

18.Различные виды уравнений прямой в пространстве ( каноническое, параметрическое, общее уравнение прямой).
Каноническое. Каноническое уравнение получается из параметрических уравнений делением одного уравнения на другое:
![]()
где![]() — координаты
— координаты
![]() и
и
![]() направляющего вектора прямой,
направляющего вектора прямой,
![]() и
и![]() координаты точки, принадлежащей прямой.
координаты точки, принадлежащей прямой.
Параметрическое. Т.к. этому уравнению удовлетворяют координаты любой точки прямой, то полученное уравнение – параметрическое уравнение прямой.
Это векторное уравнение может быть представлено в координатной форме:

Общее уравнение прямой. Линия в трехмерном пространстве определяется, вообще говоря, пересечением двух поверхностей, т.е. описывается системой двух уравнений.
Прямую в пространстве можно рассматривать как линию пересечения двух плоскостей и, следовательно, описывать системой двух линейных уравнений
A1x + B1y + C1z + D1 = 0
A2x + B2y + C2z + D2 = 0
При условии, что эти плоскости непараллельны, т.е. их нормальные векторы →n1 = {A1, B1, C1} и →n2 = {A2, B2, C2} неколлинеарны. Эта система уравнений называется общими уравнениями прямой в пространстве.
19.Условия параллельности и перпендикулярности прямых в пространстве.
ПрямыеL1 и L2 заданы уравнениями:
x-x1\m1= y-y1\n1= z-z1\p1 и x-x2\m2=y-y2\n2=z-z2\p2
Под углом между этими прямыми понимают угол между направляющими векторами S1(m1,n1,p1) и S2(m2,n2,p2). Поэтому по известной формуле для косинуса угла между векторами , получаем
Cosa= S1*S2\|S1|*|S2|или
Для нахождения острого угла между прямымиL1 и L2 числитель правой части, следует взять по модулю.
Если прямые L1 и L2 перпендикулярны, то в этом и только в этом случае имеем cosф=0 следовательно числитель дроби равен 0, т.е m1m2+n1n2+p1p2=0
Если прямые L1 и L2 параллельны, то параллельны их направляющие векторы S1и S2, следовательно, координаты этих векторов пропорциональны m1\m2=n1\n2=p1\p2.
20. Условия параллельности и перпендикулярности плоскости и прямой в пространстве.
Если прямая L параллельна плоскости Q, то векторы n и S перпендикулярны, а потому S*n=0,
Am+Bn+Cp=0, является условием параллельности прямой и плоскости.
Если прямая L перпендикулярна плоскости Q, то векторы n и S параллельны. Поэтому равенства
A\m=B\n=C\p, являются условием перпендикулярности прямой и плоскости.
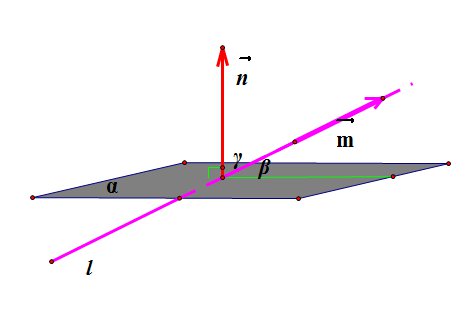
21.Угол между прямой и плоскостью.
Синус
угла ![]() между
прямой
между
прямой ![]() и плоскостью
и плоскостью ![]() равен косинусу угла
равен косинусу угла
![]() между
нормалью (
между
нормалью (![]() )
к плоскости и направляющим вектором
прямой (
)
к плоскости и направляющим вектором
прямой (![]() ),
поскольку эти два угла в сумме равны
90°.
),
поскольку эти два угла в сумме равны
90°.
![]()
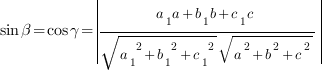
То
есть синус угла
между
прямой, направляющий вектор которой
имеет координаты ![]() и плоскостью, заданной уравнением
и плоскостью, заданной уравнением ![]() вычисляется по формуле:
вычисляется по формуле:
22.Окружность и ее уравнение.
Простейшей кривой второго порядка является окружность. Окружностью, радиуса Rс центром в точке M0, называется множество всех точек М плоскости , удовлетворяющих условию ММ0=R
Уравнение:
![]()
Уравнению удовлетворяют координаты любой точки M(x,y)данной окружности и не удовлетворяют координаты никакой точки, не лежащей на окружности. Это каноническое уравнение окружности.
Если предположить что х0=0 и у0=0 , то получим уравнение окружности с центром в начале координат х²+у²=R².