

36)Условия определённости и неопределённости систем линейных уравнений
Теорема: Если ранг основной матрицы совместной системы равен числу неизвестных, то система является определённой
Теорема: Если ранг основной матрицы совместной системы меньше числа неизвестных, то система является неопределённой.
37)Решение систем линейных уравнений метод Гаусса
Для того чтобы решить систему уравнений
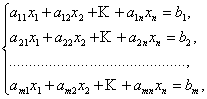 выписывают
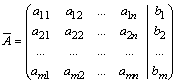
расширенную матрицу этой системы
выписывают
расширенную матрицу этой системы
 и
над строками этой матрицы производят
элементарные преобразования, приводя
ее к виду, когда ниже главной диагонали,
содержащей элементы
и
над строками этой матрицы производят
элементарные преобразования, приводя
ее к виду, когда ниже главной диагонали,
содержащей элементы
![]() будут
располагаться нули. Разрешается: 1)
изменять порядок строк матрицы, что
соответствует изменению порядка
уравнений; 2) умножать строки на любые
отличные от нуля числа, что соответствует
умножению соответствующих уравнений
на эти числа; 3) прибавлять к любой строке
матрицы другую, умноженную на отличное
от нуля число, что соответствует
прибавлению к одному уравнению системы
другого, умноженного на число. С помощью
этих преобразований каждый раз получается
расширенная матрица новой системы,
равносильной исходной, т. е. такой
системы, решение которой совпадает с
решением исходной системы.
будут
располагаться нули. Разрешается: 1)
изменять порядок строк матрицы, что
соответствует изменению порядка
уравнений; 2) умножать строки на любые
отличные от нуля числа, что соответствует
умножению соответствующих уравнений
на эти числа; 3) прибавлять к любой строке
матрицы другую, умноженную на отличное
от нуля число, что соответствует
прибавлению к одному уравнению системы
другого, умноженного на число. С помощью
этих преобразований каждый раз получается
расширенная матрица новой системы,
равносильной исходной, т. е. такой
системы, решение которой совпадает с
решением исходной системы.
38)Теорема о совместимости однородной системы линейных уравнений
. Если свободные члены системы линейных уравнений равны 0, то система однородна.
a 11
x1
+ a12
x2+…+a1nx=0
11
x1
+ a12
x2+…+a1nx=0
a21x1+a22x2+…+a2nxn=0
………………………………….
am1x1+am2x2+…+amnxn=0
Однородная система всегда совместна, т. к. набор чисел 0.0..0.всегда является решением системы, такое решение называется тревиальным.
39)Теорема о существовании ненулевых решений однородных линейных уравнений.
Для того, чтобы система однородных уравнений имела ненулевые решения, необходимо и достаточно, чтобы ранг r ее основной матрицы был меньше числа n неизвестных, т. е. r<n.
Необходимость.
Так как ранг не может превосходить размера матрицы, то, очевидно, r<=n. Пусть r=n. Тогда один из минеров размера nхn отличен от нуля. Поэтому соответствующая система линейных уравнений имеет единственное решение:
![]()
Значит, других, кроме тривиальных, решений нет. Итак, если есть нетривиальное решение, то r<n.
Достаточность:
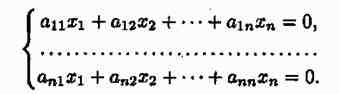
Пусть r<n. Тогда однородная система, будучи совместной, является неопределенной. Значит, она имеет бесчисленное множество решений, т. е. имеет и ненулевые решения. Пусть дана однородная система n линейных уравнений с n неизвестными
Для того, чтобы система однородных уравнений имела ненулевые решения, необходимо и достаточно, чтобы ранг r ее основной матрицы был меньше числа n неизвестных, т. е. r
Для того, чтобы однородная система n линейных уравнений с n неизвестными имела ненулевые решения, необходимо и достаточно, чтобы ее определитель D был равен нулю, т. е. D=0.
40)Линейное векторное пространство. Пространство r и линейные операции в этом пространстве.
Векторное (линейное) пространство — это математическая структура, которая формируется набором элементов, называемых векторами, для которых определены операции сложения друг с другом и умножения на число — скаляр. Введённые операции подчинены восьми аксиомам. Скаляром же может являться элемент вещественного, комплексного или любого другого поля чисел. Частным случаем векторов подобного пространства являются обычные евклидовы вектора, которые используются, к примеру, для демонстрации физических сил. При этом следует отметить, что вектор как элемент векторного пространства не обязательно должен быть представлен в качестве направленного отрезка. Обобщение понятия «вектор» до элемента векторного пространства любой природы не только не вызывает смешения терминов, но и позволяет уяснить или даже предвидеть ряд результатов, справедливых для пространств произвольной природы.
Свойства:
Векторное пространство является абелевой группой по сложению.
Нейтральный элемент
 является
единственным, что вытекает из групповых
свойств.
является
единственным, что вытекает из групповых
свойств. для
любого
для
любого
 .
.Для любого противоположный элемент
 является
единственным, что вытекает из групповых
свойств.
является
единственным, что вытекает из групповых
свойств. для
любого
.
для
любого
. для
любых
для
любых
 и
.
и
. для
любого
.
для
любого
.
Для любых векторов x, y и z из Rn и любых чисел α и β справедливо:
1. x + y = x + y, сложение коммутативно;
2. x + (y + z) = (x + y)+ z, сложение ассоциативно;
3. x + θ = x;
4. x + (−x) = θ;
5. α(x + y) = αx + αy, умножение на число дистрибутивно относительно сложения векторов;
6. α(βx) = (αβ)x, умножение на число ассоциативно;
7. (α + β)x = αx + βx , умножение вектора на число дистрибутивно относительно сложения чисел.
8. 1·x = x.
Пространство Rn − n-мерное векторное пространство, dimRn = n.
Если в пространстве Rn определен естественный базис e1, e2, ... en ,
e1= (1, 0, 0,..., 0, 0), e2= (0, 1, 0,..., 0, 0), ..., en-1= (0, 0, 0,..., 1, 0), en= (0, 0, 0,..., 0, 1),
то компоненты вектора x = (x1, x2, ..., xn) из Rn являются координатами вектора x в естественном базисе e1, e2, ... en:
x = (x1, x2, ..., xn) = x1e1+ x2e2+ ...+ xnen.
Арифметическим вектором называется упорядоченная совокупность n чисел.
Обозначается x = (x1, x2, ..., xn);
числа x1, x2, ..., xn называются компонентами арифметического вектора.
Для арифметических векторов определены линейные операции — сложение арифметических векторов и умножение вектора на число:
для любых x = (x1, x2, ..., xn), y = (y1, y2, ..., yn) и любого числа α справедливо:
x + y = (x1+ y1, x2 +y2, ..., xn+ yn); αx = (αx1, αx2, ..., αxn).
Множество арифметических векторов, для которых определены операции сложения и умножения на число называется пространством арифметических векторов Rn.
Вектор θ = (0, 0, ..., 0) называется нулевым вектором Rn,
а вектор −x = (−x1, −x2, ..., −xn) — противоположным вектором для вектора x в Rn.