

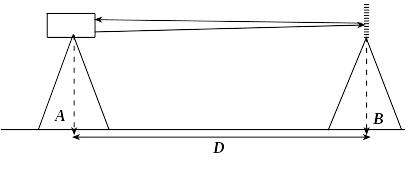
48.Принципы и методы измерения расстояний. Физический принцип действия электронных (электромагнитных) дальномеров основан на определении времени прохождения измеряемого расстояния электромагнитными волнами. Идея определения расстояний электромаг-нитными дальномерами довольно проста. Для измерения расстояния между точками А и В в одной из них устанавливают приемопередатчик, а в другой – отражатель (ретранслятор).
Э лектромагнитные
волны, посланные из точки А, отражаются
в точке В и возвращаются обратно. Если
определить время прохождения волн
вперед и обратно, то искомое расстояние
можно вычислить по формуле
лектромагнитные
волны, посланные из точки А, отражаются
в точке В и возвращаются обратно. Если
определить время прохождения волн
вперед и обратно, то искомое расстояние
можно вычислить по формуле
где v – скорость распространения волн;
τ – время;
D – искомое расстояние.
В настоящее время скорость распространения электромагнитных волн в вакууме известна с высокой точностью и принята равной: с = 299792458 м/с 1,2 м/с.
 Действительную
скорость распространения электромагнитных
волн при измерении расстояний определяют
по формуле
Действительную
скорость распространения электромагнитных
волн при измерении расстояний определяют
по формуле
где n – показатель преломления воздуха, завися-щий от температуры, давления и влажности (n 1,000296).
Задача сводится к определению времени τ. В зависимости от способов ее решения различают следующие методы измерения расстояний.
Временной (импульсный) метод. Это метод прямого измерения времени распространения электромагнитных волн. Импульсный дальномер содержит измеритель временных интервалов, запускаемый опорным импульсом от передатчика и, останавливаемый импульсом, пришедшим с дистанции.
Импульсный метод характеризуется сравнительно большой абсолютной погрешностью. Поэтому его целесообразно использовать для измерения больших расстояний, когда относительная ошибка измерения получается малой.
Частотный метод основан на использовании частотно-модулированных колебаний и сводится к измерению приращения частоты за время распространения этих колебаний до объекта и обратно. Точность таких приборов порядка 1:1000.
Применяется он, в основном, в самолетных радиовысотомерах и радиолокационных системах.
Интерференционный метод основан на непосредственном наблюдении результата интерференции двух (или более) когерентных световых волн, прошедших различные расстояния.
Применяется для измерения небольших расстояний с высокой точностью.
Фазовый метод. Этот метод измерения расстояний наиболее распространен в геодезии. Применяется для измерения расстояний от нескольких метров до десятков (а в радиодиапазоне – до сотен) км.
49сущ фаз методо. В большинстве устройств для измерения расстояний использ модулированные электромагн. колебания. Модуляция – это изменение какого-либо параметра (амплитуды, частоты или фазы) по какому-либо закону. В качестве модулятора в настоящее время широко применяют полупроводниковые лазеры на основе кристалла арсенида галлия с длиной волны излучения 0,9 мкм. Амплитудная модуляция

 До
прохождения модулятора электромаг-нитные
волны имеют частоту собственных
колебаний, которая называется несущей.
Этой частоте соответствует определенная
длина волны l¢.
После прохождения модулятора длина
несущей волны сохраняется, но амплитуда
колебаний будет изменяться с заданной
частотой.
Пусть
передатчик излучает электромаг-нитные
колебания с частотой f
, которой соответствует длина волны
До
прохождения модулятора электромаг-нитные
волны имеют частоту собственных
колебаний, которая называется несущей.
Этой частоте соответствует определенная
длина волны l¢.
После прохождения модулятора длина
несущей волны сохраняется, но амплитуда
колебаний будет изменяться с заданной
частотой.
Пусть
передатчик излучает электромаг-нитные
колебания с частотой f
, которой соответствует длина волны
Эти колебания направляются на отражатель, а также минуя дистанцию в приемную часть. Приемник усиливает их и направляет на индикатор сдвига фаз. Пусть для какого-то момента времени t колебания, пришедшие с дистанции, имеют фазу

г де
2πf–
круговая частота. Колебания, поступающие
в приемник, минуя дистанцию, для этого
же момента будут иметь фазу
де
2πf–
круговая частота. Колебания, поступающие
в приемник, минуя дистанцию, для этого
же момента будут иметь фазу
Р азность
фаз составит
азность
фаз составит
О тсюда
тсюда
г де
N
– целое число волн, уложившихся в
расстоянии 2D;
ΔN
– домер
фазового цикла или некоторая для
периода, измеряемая фазометром. В
результате получим формулу
де
N
– целое число волн, уложившихся в
расстоянии 2D;
ΔN
– домер
фазового цикла или некоторая для
периода, измеряемая фазометром. В
результате получим формулу
В этой формуле величину λ можно вычислить по известной частоте, ΔN – измерить фазометром, N – остается неизвестным. Определение целого числа периодов N называют разрешением неоднозначности.
51.Разрешение неоднозначности.
Для разрешения неоднозначности прим два способа:1)основан на плавном изменении частоты,2)на применении нескольких фиксированных частот. Первый способ заключ в следующем:при измерении линии с помощью специального устройства изменяют частоту колебаний(f),а следовательно и длину волны λ,до тех пор пока дробная часть ∆Nравна 0. тогда в расстоянии 2Д уложится целое число волн. Пусть при частоте fi длина волны λi уложится в двойное расстояние Ni , раз, тогда: 2Д= λi Ni(1). Для обозначенного определения расстояния необходимо уменьшить длину волны с таким расчетом чтобы в расстояние 2Д уложилось на n раз волн больше, тогда получим: 2Д= (Ni+n)λк(2),где λк-длина волны, соответс новой частоте fк.Из(1) и (2) следует λi Ni= Niλк+nfк; Ni=(λк/( λi-λк))n или Ni=(fi/(fк-fi))n, n-определяется визуально, f-измеряется волномером, число N-округляется до целого. Второй способ разрешения неоднозначности основан на применении нескольких фиксированных частот. Применяют два варианта построения сетки фиксированных частот:1)набирают ряд частот f1 >f2>…>fm,где каждая последующая уменьшается в целое число раз.2) наблюдают близкие частоты с расчетом, чтобы последовательно уменьшалось в целое число раз разности первой и остальных частот f1(f1-fm)>(f1-fm-1)>…>(f1-f2)
52.Точность измерения расстояний электронными дальномерами. При измерении расстояний дальномерами фазового типа формулу (4) можно записать в следующем виде
D=
 ,
,
где ∆φ - разность фаз в пределах одного периода; к - постоянная поправка. Точность определения расстояния D зависит от точности определения величин, стоящих в правой части равенства. Скорость С распространения электронных волн в вакууме известна с высокой точностью (относительная ошибка 4*10-9 ), частота/ в настоящее время определяется тоже с высокой точностью (можно эталонировать частоты с ошибкой до 1 гц). Разность фаз и постоянная поправка к тоже определяются точно. Основная проблема заключается в определении показателя преломления воздуха. Приближенно л=1 000298. Величина N=(n-\)\06 называется индексом преломления (УУ-298). Она зависит от длины волны, температуры, давления и влажности. Ошибка в температуре на 1° дает ошибку в длине линии Ј)* 10~6, а ошибки в давлении на 1 мм ртутного столба - 0,5Z)*10 . Практически температуру и давление измеряют на концах линии. Среднее интегральное значение их остается неизвестным. Это обстоятельство в основном и лимитирует точность определения расстояний электронными дальномерами.
Для ослабления ошибок, связанных с определением индекса преломления можно наблюдать в разное время, или расставлять датчики температуры, давления и влажности по измеряемой линии. На практике точность измерений расстояний конкретным дальномером обычно характеризуют эмпирической линейной зависимостью вида
mD=a+bD,(15)
где mD- средняя квадратическая ошибка расстояния; an Ь-коэффициенты. Значения коэффициентов а и b находят по методу наименьших квадратов из сопоставления длин линий с их ошибками, полученными при измерении эталонных базисов, или рассчитывают по результатам лабораторных определений отдельных ошибок. Как видно из формулы (15), ошибка складывается из двух частей: первая не зависит от расстояния, а вторая - пропорциональна расстоянию. Например, в паспорте для светодальномера СТ5 приводится mD~{ 10+5 х 10~*О) мм. Следовательно, а = 10 мм, b =5* 10"6. Эту формулу можно представить еще в таком виде: то =10 мм + 5 мм/км.
5
 7.Сущность
тахеометрической съемки. Топограф
съемка местности, выполняемая при
помощи тахеометра полярным способом
относительно пунктов съемочного
обоснования, называется тахеометрической.
Такое название она получила потому,
что при одной установке прибора
теодолита
(тахеометра) и однократном визировании
на точку можно измерить три величины,
характеризующие положение снимаемой
точки в плане и по высоте: горизонтальное
направление на
эту точку,
определяемое по лимбу горизонтального
круга; расстояние от станции до снимаемой
точки, измеряемое дальномером; превышение
точки над станцией, отсчитываемое или
вычисляемое по измеряемому углу наклона
и расстоянию. Суть тахеометрической
съемки можно проиллюстрировать на
рис.
7.Сущность
тахеометрической съемки. Топограф
съемка местности, выполняемая при
помощи тахеометра полярным способом
относительно пунктов съемочного
обоснования, называется тахеометрической.
Такое название она получила потому,
что при одной установке прибора
теодолита
(тахеометра) и однократном визировании
на точку можно измерить три величины,
характеризующие положение снимаемой
точки в плане и по высоте: горизонтальное
направление на
эту точку,
определяемое по лимбу горизонтального
круга; расстояние от станции до снимаемой
точки, измеряемое дальномером; превышение
точки над станцией, отсчитываемое или
вычисляемое по измеряемому углу наклона
и расстоянию. Суть тахеометрической
съемки можно проиллюстрировать на
рис. ![]() Пусть известны координаты и высоты
опорных точек А
и В.
Требуется определить плановое и высотное
положение некоторой характерной точки
местности М.
Для определения положения точки М
в точке А
устанавливается теодолит (тахеометр),
а в точке М
– рейка. Прибор ориентируется так,
чтобы отсчет по горизонтальному кругу
на точку B
был равен нулю. Затем труба наводится
на рейку и производится отсчеты по
дальномеру, горизонтальному и
вертикальному кругам. Отсчет по
горизонтальному кругу, будет равен
углу β.
На основе отсчета по вертикальному
кругу можно получить угол наклона
визирной оси трубы v.
Пусть известны координаты и высоты
опорных точек А
и В.
Требуется определить плановое и высотное
положение некоторой характерной точки
местности М.
Для определения положения точки М
в точке А
устанавливается теодолит (тахеометр),
а в точке М
– рейка. Прибор ориентируется так,
чтобы отсчет по горизонтальному кругу
на точку B
был равен нулю. Затем труба наводится
на рейку и производится отсчеты по
дальномеру, горизонтальному и
вертикальному кругам. Отсчет по
горизонтальному кругу, будет равен
углу β.
На основе отсчета по вертикальному
кругу можно получить угол наклона
визирной оси трубы v.
![]() Дальномерное
расстояние получают по формуле D
= kl+c, где l
– отрезок
рейки между крайними дальномерными
нитями; k –
коэффициент
дальномера (k
= 100);
c
– постоянное
слагаемое. Обычно D
определяется сразу как число делений
рейки между нитями. По дальномерному
расстоянию D
и углу наклона v
можно
вычислить горизон-тальное проложение
линии s
и основной член превышения h/
по формулам: s=
D cos2v,
Дальномерное
расстояние получают по формуле D
= kl+c, где l
– отрезок
рейки между крайними дальномерными
нитями; k –
коэффициент
дальномера (k
= 100);
c
– постоянное
слагаемое. Обычно D
определяется сразу как число делений
рейки между нитями. По дальномерному
расстоянию D
и углу наклона v
можно
вычислить горизон-тальное проложение
линии s
и основной член превышения h/
по формулам: s=
D cos2v,
Действительное превышение точки М над точкой А найдется по формуле h = h/ + i – υ, где i – высота прибора; υ – высота точки визирования. На практике часто принимают i= υ, тогда h = h/. Зная превышение, вычисляем высоту точки по формуле: HM = HA + h. Таким образом, плановое положение точки М найдется методом полярных координат по горизонтальному углу β и расстоянию s, а высотное по углу наклона v и дальномерному расстоянию. Тахеометрическая съемка производится для получения топографического плана в крупном масштабе (1:500, 1:1000) на небольшие по площади участки местности, а также на полосу местности вдоль протяженных объектов, например линий газопровода, дорог и т.д.
58. Способы создания съемочного обоснования. Съемка ситуации и рельефа.
Т ахеометрическая
съемка выполняется по принципу от
общего к частному. В начале создается
съемочное обоснование. Поскольку эта
съемка топографическая, то необходимо
получить координаты и высоты точек
съемочного обоснования. В зависимости
от условий местности и наличия приборов
могут применяться различные способы.
Планово-высотное съемочное обоснование
создается теодолитно-нивелирными
ходами, т.е. через выбранные и закрепленные
на местности (колышками или металлическими
стержнями) пункты проклады-ваются
теодолитный ход и ход технического
нивелирования. Местоположение пунктов
съемочного обоснования выбирается с
таким расчетом, чтобы весь участок
местности был покрыт съемкой без
пропусков, а расстояния до съемочных
пикетов не превышали допустимых величин
(60–100 м при съемках в масштабах 1:500 и
1:1000). При съемке небольших и вытянутых
участков съемочное обоснование можно
создавать проложением тахеометри-ческих
ходов одновременно со съемкой. При этом
вначале измеряются горизонтальные и
вертикальные углы одним полным приемом
и расстояния между точками хода
(станциями), а затем производится съемка
ситуации и рельефа. Линии тахеометрического
хода измеряются в прямом и обратном
направлениях. Формулы допустимых
невязок в тахеометрическом ходе
следующие:
ахеометрическая
съемка выполняется по принципу от
общего к частному. В начале создается
съемочное обоснование. Поскольку эта
съемка топографическая, то необходимо
получить координаты и высоты точек
съемочного обоснования. В зависимости
от условий местности и наличия приборов
могут применяться различные способы.
Планово-высотное съемочное обоснование
создается теодолитно-нивелирными
ходами, т.е. через выбранные и закрепленные
на местности (колышками или металлическими
стержнями) пункты проклады-ваются
теодолитный ход и ход технического
нивелирования. Местоположение пунктов
съемочного обоснования выбирается с
таким расчетом, чтобы весь участок
местности был покрыт съемкой без
пропусков, а расстояния до съемочных
пикетов не превышали допустимых величин
(60–100 м при съемках в масштабах 1:500 и
1:1000). При съемке небольших и вытянутых
участков съемочное обоснование можно
создавать проложением тахеометри-ческих
ходов одновременно со съемкой. При этом
вначале измеряются горизонтальные и
вертикальные углы одним полным приемом
и расстояния между точками хода
(станциями), а затем производится съемка
ситуации и рельефа. Линии тахеометрического
хода измеряются в прямом и обратном
направлениях. Формулы допустимых
невязок в тахеометрическом ходе
следующие:
г де
n
– число углов в ходе. Для невязки в
периметре:
де
n
– число углов в ходе. Для невязки в
периметре:
г де
s
– длина хода, м; n
– число сторон в ходе. Для невязки в
сумме превышений по ходу:
де
s
– длина хода, м; n
– число сторон в ходе. Для невязки в
сумме превышений по ходу:
При наличии созданного съемочного обоснования тахеометрическая съемка выполняется в такой последо-вательности.
Теодолит устанавливают в рабочее положение над точкой съемочного обоснования, измеряется высота прибора с точностью до 1 см, которая записывается в журнал и отмечается на дальномерной рейке.
За нулевое направление лимба принимается направление на другую точку съемочного обоснования, лучше на ту, которая расположена слева от снимаемой территории.
3. Производится съемка ситуации и рельефа. Намечается маршрут движения реечника. После установки рейки в точке 1 труба наводится на рейку, определяется дальномерное расстояние D, производится отсчет по горизонтальному кругу и по вертикальному кругу.
При
измерении расстояния для упрощения
работы одну из дальномерных нитей
наво-дят на верх рейки, а по второй
отсчитывают расстояние. Вертикальный
угол обычно измеряют при наведении
средней нити на высоту прибора, отмеченную
на рейке. Если визировали на верх рейки
или какую-нибудь другую высоту, то она
обязательно фиксируется в журнале.
Рейку устанавливают на всех характерных
точках ситуации и рельефа. Параллельно
с полевым журналом на каждой станции
ведется абрис. Его оформляют условными
знаками с пояснительными надписями,
примерно выдерживая масштаб съемки. В
абрис записывают все пикетные точки.
При этом показывают структурные линии
рельефа и схематично рельеф горизонтали.
Количество реечных точек зависит от
сложности ситуации и рельефа. В целях
контроля с каждой станции определяют
несколько пикетов, снятых с соседней
станции. При съемке равнинных участков
превышения рекомендуется определять
горизонтальным лучом. Горизонтальность
визирной оси обеспечивается установкой
по вертикальному кругу отсчета, равного
месту нуля. При работе горизонтальным
лучом можно сразу вычислять высоты
пикетов. Рейку устанавливают нулем
вверх и делают отсчет по средней нити
а.
![]()
Из рис. следует HB = HA + i + a – v, где v – длина рейки. Обозначим HA + i – v как H/A. Тогда HB = H/A +a. По окончании работ на станции обязательно проверяется ориентировка прибора с записью в журнале. Изменение ориентировки допускается не более 1,5/.
59. Обработка материалов тахеометрической съемки и составление плана. Выполнение полевых работ при тахеометрической съемке необходимо сочетать с незамедлительной камеральной обработкой материалов съемки. Камеральные работы включают в себя:
- проверку журналов полевых измерений и составление схемы съемочного обоснования;
- вычисление плановых и высотных координат пунктов съемочного обоснования;
- вычисление высот пикетов;
- нанесение на план пунктов съемочного обоснования, пикетов, рисовку ситуации и изображение рельефа горизонталями.
В результате производства тахеометри-ческой съемки представляются:
- абрисы к соответствующим план-шетам;
- журнал тахеометрической съемки;
- план тахеометрической съемки;
- схема съемочного обоснования;
- ведомости вычисления координат и высот точек съемочного обоснования;
- акты контроля и приемки работ.
Средние ошибки в положении на плане предметов и контуров местности с четкими очертаниями не должны превышать 0,5 мм. Предельная погрешность во взаимном положении капитальных зданий и сооружений не должна превышать 0,4 мм. Средние ошибки съемки рельефа относительно ближайших точек геодезического обоснования не должна превышать по высоте ¼ высоты сечения рельефа при v < 20, 1/3 hc при 20 < v < 60 для масштаба 1:5000, 1:2000 и до 100 для 1:1000 и 1:500. Данные, полученные при съемке электронными тахеометрами, можно передавать на компьютер для последующей обработки различным программным обеспечением. Одним из наиболее широко используемых для этих целей пакетов программ сегодня является комплекс CREDO.
60.Приборы, применяемые для тахеометрической съемки. В настоящее время производство тахеометрических съемок осуществляется с использованием современных геодезических приборов – электронных тахеометров. Электронный тахеометр - оптико-электронный прибор, совмещающий в себе функции теодолита, нивелира и дальномера с микропроцессорным управлением измерениями, хранением и обработкой их результатов. Электронные тахеометры дают возможность:развивать сети сгущения; производить плановую и высотную привязку аэрофотоснимков; создавать съемочное обоснование; выполнять топографические съемки; координировать границы земельных участков; выносить в натуру проекты границ при межхозяйственном и внутрихозяйственном землеустройстве; решать другие задачи. Возможности электронных тахеометров не ограничиваются одним только производством топографических съемок. В зависимости от встроенного в прибор программного обеспечения можно решать задачи, возникающие при проведении дорожных работ (вынос поверхности дороги), выполнять архитектурные обмеры. Крупнейшими мировыми компаниями, выпускающими около 100 моделей и модификаций электронных тахеометров, от самых простых до полностью роботизированных систем измерений, являются: Topcon Positioning Systems (Япония); Nikon (Япония); Leica Geosystems (Швейцария); Sokkia (Япония); Trimble Navigation (США); Pentax (Япония); УОМЗ - Уральский оптико-механический завод (г.Екатеринбург, Россия). Исходя из функциональных возможностей электронных тахеометров их можно разделить на несколько групп: Первая группа - приборы начального уровня. Эта категория приборов способна производить самые простые функции измерений и вычислений. Угловая точность таких приборов находится в пределах 5"–10'', линейная – около 5 мм. Дальность измерения расстояния не превышает 500 - 1000 м по одной призме. В них отсутствует безотражательный режим работы. Вторая группа – приборы среднего класса. Эти тахеометры получили наиболее широкое распространение благодаря универсальности их применения. Угловая точность у таких приборов находится в пределах от 1" до 5", дальность измерения расстояний по одной призме составляет 1500–2500 метров. Третья группа – это роботизированные или полуроботизированные приборы. Эти приборы могут самостоятельно наводиться на специальный активный отражатель и производить измерения. Внутри этого класса выделяют: полуроботизированные тахеометры со следящей системой; роботизированные тахеометры, оснащенные дистанцион управлением.