

1.Общие сведения о грузоподъемных машинах. Классификация грузоподъёмных машин по типам и конструкции.
Служебный
Служебный
2.Расчет грузоподъемных машин (общие положения)
Служебный
Служебный
3.Элементы грузоподъёмных машин. Грузозахватные приспособления [1], c.126-153, [2], c.127-146.
Служебный
Служебный
4.Элементы грузоподъёмных машин. Гибкие грузовые и тяговые элементы [1], c.154-180, [2], c.111-115, [3], c.225-231.
Служебный
Служебный
5.Элементы грузоподъёмных машин. Блоки и полиспасты [1], c.181-186, [1], c.202-204, [2], c.116-117, [3], c.228-231.
Служебный
Служебный
6.Элементы грузоподъёмных машин. Грузовые барабаны [1], c.186-202, [2], c.117-126.
Служебный
Служебный
7.Элементы грузоподъёмных машин. Остановы и тормоза [1], c.205-272, [2], c.80-106.
Служебный
Служебный
8.Элементы грузоподъёмных машин. Ходовые колёса и рельсы [1], c.410-420, [2], c.167-176.
Служебный
Служебный
9.ПРИВОД ГРУЗОПОДЪЕМНЫХ МАШИН.
Служебный
Служебный
10.ГРУЗОПОДЪЕМНЫХ МАШИН.
Служебный
Служебный
11.ГРУЗОПОДЪЕМНЫХ МАШИН.
Служебный
Служебный
12.ГРУЗОПОДЪЕМНЫХ МАШИН.
Служебный
Служебный
13.ГРУЗОПОДЪЕМНЫХ МАШИН.
Служебный
Служебный
14.Механизмы грузоподъёмных машин. Механизм поворота кранов.
Лекция 14– 4 часа. [1], c.434-462, [2], c.183-193, [7], c.435–464.
Цель лекции: 1. Изучить конструкцию механизма поворота;
2. Изучить принципы расчёта механизмов поворота.
План лекции:
Служебный
Служебный
14. Механизмы грузоподъёмных машин. Механизм поворота кранов.
14.1 Схемы механизмов.
14.2 Сопротивление повороту крана.
14.2.1 Сопротивление в опорах при повороте крана.
14.2.2 Сопротивление от ветровых нагрузок.
14.2.3 Сопротивление от уклона крана.
14.3 Мощность привода.
14.4 Выбор редуктора.
14.5 Выбор тормоза.
14.6 Предохранительные устройства в приводе.
14.7 Вопросы для самостоятельного изучения.
14.7.1 Сопротивление в многороликовой опоре крана на неподвижной колонне [1], c.449-450.
Механизмы предназначены для вращения поворотной части крана вместе с грузом относительно вертикальной оси.
14.1Схемы механизмов.
Механизмы поворота можно классифицировать по следующим признакам.
По расположению на кране:
механизм установлен на неповоротной раме крана и вращает зубчатый венец;
механизм установлен на поворотной части крана и вращается вместе с ним в результате обкатывания приводной шестерни вокруг неподвижного зубчатого венца на раме;
По конструкции (рис.14.1):
с горизонтальным расположением двигателя и червячным (а) или зубчатым (б) редукторами, в том числе с зацеплением Новикова и с канатным приводом (в);
с вертикальным расположением двигателя и применением планетарного или зубчатого (г), волнового редукторов; с гидравлическим приводом;
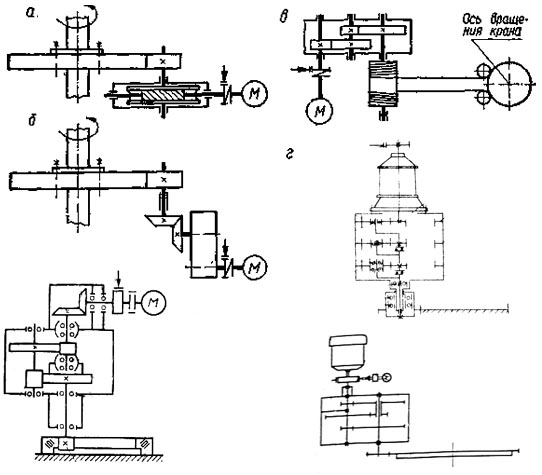
Кинематические схемы механизма поворота крана.
При больших диаметрах зубчатого венца применяют цевочное зацепление.
Для современных кранов наиболее рациональным механизмом поворота является привод с вертикальным расположением двигателя с планетарным или волновым редукторами, характеризующийся компактностью конструкции, легкостью и простотой обслуживания.
Гидравлический привод механизма поворота обладает широкой и плавной регулировкой скорости поворота, компактностью и большой надежностью.
Механизм поворота с канатным приводом в новых кранах не находит применения так как имеет существенные недостатки– большие габариты и масса, малая точность остановки.
14.2Сопротивление повороту крана.
Сопротивление повороту крана в установившийся период определяется трением в опорах, зависящих от конструкции опорно-поворотного устройства, ветровых нагрузок и отклонения оси поворотной части от вертикали.
14.2.1Сопротивление в опорах при повороте крана.
Опорные устройства бывают:
на подшипниках при вращающейся колонне крана; на роликовой опоре и подшипниках в кранах на неподвижной колонне;
на ролико-шариковых опорных кругах или на ходовых колесах в передвижных и других типах кранов.
Статический момент сопротивления повороту в общем случае равен сумме моментов сил трения в опорах MТР, ветровых нагрузок МВ и уклона крана МУК (кН м)
МС = ∑МТР + МВ + МУК;
14.2.1.1Сопротивление в подшипниковых опорах крана на вращающейся колонне (с внешней верхней опорой).
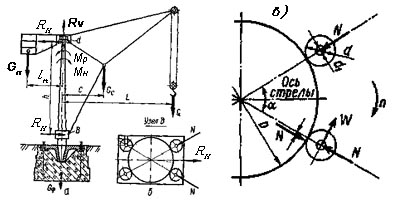
Сопротивление в подшипниковых опорах крана с вращающейся колонной (рис.14.2). Вертикальная реакция, воспринимаемая подпятником,
R V
= G
+ GK
+ GC
,
V
= G
+ GK
+ GC
,
где G , GK , GC — соответственно вес груза, колонны и стрелы.
Горизонтальные реакции находим из уравнения равновесия:
GL + GC с – RH h = 0,
RH = (GL + GC с) / h .
Радиус трения сплошной пяты
ρ1 = d3 / 3;
кольцевой пяты
ρ2 = ,
где dн, dв — наружный и внутренний диаметры пяты.
Расчетная схема крана с поворотной колонной
Момент сопротивления повороту от сил трения в опорах MТР (кН м)
МТР = RH f1 d1 / 2 + RH f2 d2 / 2 + RV f3 d3 / 2 ,
где d1, d2, d3 — диаметры верхней и нижней опор и подпятника;
f1, f2, f3 — коэффициенты трения в верхней и нижней опорах;
f = 0,015...0,020 для подшипников качения.
14.2.1.2Сопротивление в роликовой опоре и подшипниках крана на неподвижной колонне.
Вертикальное усилие (рис.14.3), воспринимаемое упорным подшипником верхней опоры, равно сумме веса поднимаемого груза G и веса вращающихся частей крана– GC (стрелы) и GП (противовеса):
RV = G + GC + GП ,
Расчетные схемы крана с неподвижной колонной
Для увеличения устойчивости крана и уменьшения изгибающих моментов, действующих на колонну, устанавливают противовес.
Вес противовеса определяется из условия равенства суммы статических моментов, действующих на кран в нагруженном и разгруженном состояниях:
Mн=G L + Gc c – Gn ln,
Mр= Gc c – Gn ln .
Приравнивая моменты Mн = – Мр (Mн – направлен в сторону груза, Мр – направлен в сторону противовеса), определим
G L + Gc c – Gn ln = – Gc c + Gn ln
Gn
= (![]() L
+ Gc
c)
L
+ Gc
c)
![]() .
.
В связи с переменным весом груза на крюке кран не бывает полностью уравновешен: при номинальной грузоподъемности колонна крана изгибается в сторону груза моментом от половины веса груза, и при отсутствии груза — в сторону противовеса.
Горизонтальную реакцию RH находим из уравнения моментов для груженого крана
RH = (G L + Gc c – Gn ln ) / h .
Момент сил трения в верхней опоре и нижнем опорно-поворотном устройстве:
∑ МТР = МТР1 + МТР2 + МТР3.
Моменты сил трения в радиальных подшипниках верхней и нижней опор:
МТР1 = RH f1 d1 / 2; МТР2 = RH f2 d2 / 2/
Момент сил трения в упорном подшипнике:
МТР3 = RV f3 d3 / 2 ,
Нижнюю опору обычно выполняют в виде обоймы для роликов или катков, катящихся по колонне (рис.14.3, б). Катков может быть два, если сила Н направлена в одну сторону при работе с грузом и без груза (кран не имеет противовеса), и четыре, если она изменяет свое направление (кран имеет противовес). Независимо от конструкции обоймы в каждый данный момент работают только два катка. Каждый из катков передает на колонну силу
N = RH / (2 cos α/2),
При определении момента сопротивления в нижней опоре качение катков по неподвижной колонне рассматривают как качение по плоскости. Тогда сила сопротивления движению катка, нагруженного силой N.
W = N ( 2 μ + d1 f ) / d ,
где d, d1 — диаметр поверхности катания и диаметр оси катка;
μ , f — коэффициенты трения качения и в подшипнике опоры катка.
Момент сопротивления движению двух катков относительно оси колонны с учетом того, что реакция от силы N, приложенной к колонне с эксцентриситетом относительно линии, соединяющей центр колонны с центром ролика, создает момент N μ
MH
= 2 W
![]() + 2 N
μ
=
+ 2 N
μ
=
= N ( 2 μ + d1 f ) + 2 N μ = N (( 2 μ + d1 f ) + 2 μ) =
=
N
(( 2 μ
+ d1
f
)(
![]() +1)+ 2
μ)
=
+1)+ 2
μ)
=
=
![]() (( 2 μ
+ d1
f
)(
+1)+ 2
μ)
.
(( 2 μ
+ d1
f
)(
+1)+ 2
μ)
.