

робототехника
Билет№1.
Предпосылки развития мехатроники и области применения мехатроннных и робототехнических систем.
Интеллектуальный робот.
1. Формально робототехника и мехатроника объединены в соответствующие научное направления, но определяются по разным квалификационным признакам. Робототехника определена по функциональному назначению, а мехатроника — по физическому составу. Многие компоненты средств робототехники можно отнести к мехатронным. В свою очередь мехатронные устройства реализуют робототехнические системы. Из этою следует, что мехатроника должна иметь много общего с робототехникой и принципах построения и методах проектирования.
Мехатроника возникла в результате органического слияния электромеханики и микроэлектроники в виде прежде всего автоматических технических объектов и систем. Возникла благодаря наличию таких объектов нового типа, которые требуют системного подхода.
Предмет робототехники – создание и применение роботов, других средств робототехники и основанных на них технических систем и комплексов различного назначения. Робототехника возникла на основе кибернетики и механики. В кибернетике это связано с интеллектуальным управлением и идеями, заимствованными у живой природы, а в механике – с многостепенными механизмами типа манипуляторов.
Робототехника уходит корнями в древность, когда были предприняты первые попытки создания человекоподобных устройств, подвижных статуй, механических слуг и т. д. Статуи богов с подвижными частями тела появились в Древнем Египте, Вавилоне, Китае. «Илиада» Гомера – кузнец Гефест выковывает механических служанок. Аристотель – куклы марионетки.
Средние века – различного рода автоматы, основанные на использовании часовых механизмов, созданы часы с движущимися фигурами людей, ангелов и т.п.
17 в - появление первых подвижных человекоподобных механических фигур – андроидов (андроид алхимика Альберта Великого представлял собой куклу ростом с человека, которая, когда стучали в дверь, открывала и закрывала ее, кланяясь). Работы по созданию андроидов – большее развитие в 18 в. Созданы: андроиды-музыканты, рисовальщики («флейтист» - ростом с человека, подвижными пальцами исполнял 11 мелодий с помощью заложенной программы). Отечественные: 1820 – открыт «Храм очарований», обслуживаемый механическими слугами.
20 в – создание «механических» людей возрождается с развитием электротехники и электроники. 1932 – человекоподобный автомат «Альфа», который по командам, подаваемым голосом, садился и вставал, двигал руками и говорил. Аналогичные роботы создавались, управлялись по радио, могли ходить – в основном в рекламных целях такие устройства.=>современная робототехника появилась во второй пол. 20в.: появилась реальная потребность в универсальных манипуляционных машинах-автоматах и для их развития возникли необходимые научно-технические предпосылки.
Объективной причиной возникновения и развития современной робототехники явилась историческая потребность производства в гибкой автоматизации с устранением человека из непосредственного участия в машинном производстве. Системы и комплексы, автоматизированные с помощью роботов, принято называть роботизированными. Роботизированные системы, в которых роботы выполняют основные технические операции, называются робототехническими.
Области применения: наибольшее распространение в промышленности и машиностроении. Такие роботы наз. промышленными роботами (ПР). Горнодобывающая промышленность, металлургия, нефтяная промышленность (обслуживание бурильных установок, монтаж ремонт), строительство (транспорт монтаж ремонт), легкая, пищевая промышленность. Также медицина (протезирование, хирургия), сфера обслуживания, исследование и освоение океана, работы в экстремальных условиях.
2.XXI в. — создание интеллектуальных роботов. Стали заменителями людей в их профессиональной деятельности. Интеллектуальный робот — это робот конкретного назначения, в основных функциональных системах которого используются методы искусственного интеллекта, что позволяет расширить сферу применения робототехники практически на все области человеческой деятельности. Термин "искусственный (технический, машинный) интеллект" (ИИ) означает, что обладающая им техническая система способна выполнять функции, которые, если бы их выполнял человек, считались бы интеллектуальными, т. е. требовали бы от человека приложения его естественного интеллекта. Искусственный интеллект имитирует естественный только в узко специальном (профессиональном) отношении и никаких более широких аналогий с естественным интеллектом не имеет. Последний неизмеримо шире, охватывая все сферы человеческой деятельности, включая социальную, а также эмоциональность и принципиально иную мотивацию, свойственную только человеку. Первые их образцы уже начинают появляться на рынке.
Вторая принципиальная особенность естественного интеллекта— это наличие наряду с формализуемой символьной составляющей, реализуемой левым полушарием головного мозга, подсознательной образной составляющей. Она ответственна за интуитивную мыслительную деятельность человека, определяет его творческие способности. Эта непознанная сторона естественного интеллекта пока остается недоступной для воспроизведения в искусственном интеллекте, что ограничивает его потенциальные возможности.
Методы ИИ можно разделить на формализуемые и интуитивные. Первые — это математические методы, основанные на теории вероятности, математической логике, теории игр и лингвистике. Они полноценно воспроизводят "левополушарное" мышление человека, в ИИ играют важную, но не определяющую роль. Определяющими уровень искусственного интеллекта являются интуитивные методы, заимствованные из профессиональной человеческой практики. К ним относятся, прежде всего, основанные на знаниях (на "законсервированном" интеллекте человека) методы теории экспертных систем, ассоциативной памяти, нейросетевых структур.
В робототехнике искусственный интеллект требуется, прежде всего, для решения следующих задач:
□обработка сенсорной информации;
□формирование моделей внешней среды;
□принятие решений и планирование поведения;
□управление движением;
□создание интеллектуального интерфейса между человеком-оператором и роботом.
Функции интеллектуального робота:
1. Восприятие и распознавание образов окружающего мира
2. Общение с человеком
3. Планирование и перепланирование поведения
4. Навигация (управление целенаправленными действиями)
5. Управление приводами
6. Обучение (формирование модели окружающего мира)
7. Общение с другими роботами и оборудованием.
Примеры: В 1968 г. в СССР был создан телеуправляемый от ЭВМ подводный робот "Манта" с очув- ствленным захватным устройством, а в 1971 г. — следующий его вариант с техническим зрением и системой целеуказания на телевизионном экране.
В 1969 г. в США (Станфордский институт) в рамках работ по искусственному интеллекту был разработан экспериментальный макет подвижного робота "Шейки" с развитой системой сенсорного обеспечения, включая техническое зрение, обладавшего элементами искусственного интеллекта, что позволило ему целенаправленно передвигаться в заранее неизвестной обстановке, самостоятельно принимая необходимые для этого решения.
В конце XX в - робот способен двигаться по лестнице и преодолевать другие препятствия, выполнять весьма сложные манипуляции и вести диалог с человеком. Робот предназначен для домашних работ, может быть гидом, экскурсоводом и т. п. Вес — 43 кг, скорость ходьбы — до 1,6 км/час.
Билет №2
Преимущества и перспективы развития мехатронных и робототехнических устройств и систем.
Экстремальная робототехника(ЭР)
1.С самого начала в развитии робототехники определялись две цели-прикладная и фундаментальная. Прикладная - развитие современного производства, т.е. переход к комплексной гибкой автоматизиции, к гибким автоматизированным производствам. Здесь же развилась экстремальная робототехника, медицинская микроробототехника, биоробототехника, шагающие машины и др. Фундаментальная - экспериментальное изучение и воспроизведение феномена разумного поведения животных, отсюда направление в развитии «искусственного интеллекта»: исследования типа «глаз-рука» и других очувствленных мобильных объектов. Здесь цель воспроизведение процесса эволюции живой природы. Конечным научно-техническим результатом этих исследований должны стать принципы и методика самоусовершенствования интеллектуальных технических систем типа «робот», для которых не будут пределом интеллектуальные способности человека.
В последствии решение проблемаы «искусственного интеллекта» инициирует проблему создания «искусственной мышцы»- электрические, гидравлические, пневматические привода, то что уже создали в процессе изучения.
Сегодня перспективы робототехники целиком зависит от решения ранее перечисленных фундаментальных проблем. Генеральное направление дальнейшего развития робототехники - комплексная миниатюризация компонентов и интеллектуализация в виде распределенного интеллекта, пронизывающего все системы роботов от сенсорики до приводов и конструктивных материалов.
Планы: 1.узкоспециализированный профессиональный коллективный интеллект, как у людей (пока есть только личный, т.е. программное управление и адаптация).2.Искусственный разум, воспроизводящий наряду с интеллектом творческие способности(креативность)человека.
Области, где будут реализоваться достижения в решении проблем робототехники:
1. робототехника наземного и воздушного транспорта
2. био- и медицинская робототехника
3.космическая робототехника(освоение планет)
4.подводная робототехника(роботы-амфибии)
P.S.
Александр Иванович Галушкин, доктор технических наук, профессор, заслуженный деятель наук России:
«Я убежден в том, что нейросетевые технологии – это основа построения будущих систем управления роботами, т.е. мозга будущих роботов».
Теория нейронных сетей – это, по сути, то направление, которое связано с разработкой алгоритмов решения задач робототехники. ы видим современный мозг и нервную систему робота как такую распределенную вычислительную сеть нейрокомпьютеров, где есть центральный нейрокомпьютер, решающий основные, базовые задачи, о которых я сейчас скажу, и периферийные специализированные нейрокомпьютеры. Это наши старые разработки, монографии, посвященные описанию практически всех наших работ.
Именно теория нейронных сетей, нейроматематика, нейроуправление и нейрокомпьютеры – это основа для построения интегрированных систем управления современными и перспективными роботами.
2.Экстремальная робототехника(ЭР).
Одно из назначений робототехники - выполение различного рода работ в экстремальных внешних условиях либо опасных и вредных для человека, либо вообще полностью исключающих его присутствие. Соответствующий раздел робототехники получил наименование «экстремальная робототехника».
Под экстремальными условиями(ЭУ) понимаются как аварийные ситуации, включая стихийные бедствия, так и штатные экстремальные ситуации, определяемые технологией производства (в атомной энергетике, промышленности, химических и горнодобывающих отраслях, военном деле, освоении космоса и т.д.). ЭУ определяются, прежде всего, внешними условиями работы (радиация, температура, сильные электромагнитные поля давление и т.д.).
Основным типом техн. систем, требующихся для выполнения перечисленных операций, являются робототехнические системы (РТС), благодаря характерной для них многофункциональности и гибкости позволяющие оперативно выполнять различные технологические операции, нередко для выполнения отдельных типовых операций требуется довольно широкий список специальных технологических систем, с которыми должны взаимодействовать РТС. Примерами РТС являются строительные, погрузо-разгрузочные машины в специальном исполнении для работы в ЭУ.
Наиболее важными характеристиками РТС здесь являются способы управления, перемещения, энергопитания. Управление сейчас в основном со стороны человека-оператора и местного автоматического управления. Перемещение к месту работы может обеспечиваться спец.транспортным средствами(краны, вертолеты) или собственной системой передвижения. Энергопитание может быть автономным, кабельным или комбинированным.
По характеру операции, выполняемых РТС можно объединить в 2 группы: инспекционные и технологические. Первые(разведчики) снабжаются манипуляторами и другими исполнительными устройствами - для расчистки проходов, поиска/взятия проб/объектов. Вторые предназначены для выполнения различных технологических операций с помощью сменных рабочих органов, включая укрепленные на шасси сварочные аппараты, грейферы (разновидность грузозахвата для сыпучих грузов, часть оборудования экскаватора или крана.), бульдозерные отвалы(предназначен для очистки улиц, дорог, тротуаров и других участков от мусора, снега, песчаных наносов методом сгребания).
Ожидания от РТС работающих в ЭУ: создание атономных и телеуправляемых мобильных РТС с развитой сенсорикой, адаптивным и интеллектуальным управлением.
Билет №3.
Функциональная схема робота.
Манипуляторы с прямоугольной системой координат.

1.
В общем виде включает исполнительные системы – манипуляционную (один или несколько манипуляторов) и передвижения (транспортную), информационно-управляющую, сенсорную, дающую информацию о внешней среде и систему связи с оператором, а также с другими взаимодействующими с роботом машинами. Исполнительные системы состоят из механической системы и системы приводов. Механическая система манипулятора – это обычно кинематическая цепь, состоящая из подвижных звеньев с угловым или поступательным перемещением, которая заканчивается каким-нибудь рабочим инструментом или захватным устройством.
2.
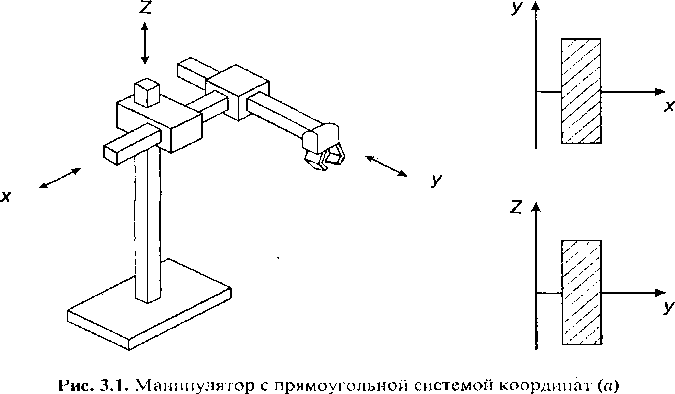
Манипуляторы, работающие в прямоугольной системе координат имеют рабочую зону в форме параллелепипеда. Здесь все перемещения только поступательные. Поэтому такая система координат наиболее удобна для выполнения прямолинейных движений. Кроме того, она максимально упрощает программирование робота, так как оно обычно выполняется именно в прямоугольной системе координат, и, следовательно, в этом случае не требуется пересчета программ из одной системы координат в другую. Имеет всего по 3 переносных степени подвижности.
Билет №4.
Термин "робот". Три закона робототехники.
Робототехника в непромышленных областях.
1. Робот - это машина автоматического действия, которая объединяет свойства машин рабочих и информационных, являясь, таким образом, принципиально новым видом машин. Могут быть основным технологическим оборудованием (сборка, сварка, окраска) так и вспомогательного – замена рабочих, занятых обслуживанием такого оборудования. Универсальность роботов помогает автоматизировать принципиально любые операции, выполняемые человеком.
Первый Закон: Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред.
Второй Закон: Робот должен повиноваться командам человека, если эти команды не противоречат Первому Закону.
Третий Закон: Робот должен заботиться о своей безопасности, поскольку это не противоречит Первому и Второму законам.
Законы для роботов сформулировал Айзек Азимов в произведении "Три закона робототехники". В рассказах Азимова эти три закона заложены в «позитронный мозг» каждого робота. Он американский фантаст и популяризатор науки. Азимов отмечает, что действие Трёх Законов можно распространить на все инструменты, созданные человеком:
Инструмент должен быть безопасным для использования — например, у ножей имеются рукоятки.
Инструмент должен выполнять свои функции при условии, что он не представляет ни для кого никакой опасности.
Инструмент должен оставаться в целости и сохранности во время его использования, если только его уничтожение не продиктовано соображениями безопасности или если это не входит в его функцию.
2. Широкие возможности открывает робототехника в сельском хозяйстве. Особенности применения - в большой территориальной протяженности, сезонности работ, сильной зависимости от погодноклиматических условий, в непосредственном контакте с животными и растениями, имеющими большую разбросанность характеристик и существенные специфические требования к взаимодействию с ними. Одна из важных задач - создание роботов для вождения тракторов, комбайнов с высвобождением трактористов (заменять трактористов при выполнении работ особо опасных (внесения ядохимикатов и т. п.) или утомительных - вождение прореживателей строго по рядкам растений и т. п.). - позволит повысить производительность агрегатов, сменность, ритмичность и качество работы, снизить расход топлива.
Одна из наиболее трудоемких отраслей с/х производства— овощеводство и картофелеводство. Производительность труда на ряде операций ограничена физическими возможностями человека. Например, для укладки рассады в высаживающий аппарат требуется несколько сажальщиц на каждой рассадочной машине, которые должны работать в ритме примерно одна операция в секунду в условиях тряски, пыли, при различной погоде.
В теплицах применение мобильных роботов позволяет комплексно автоматизировать большой круг работ по подготовке почвы, высеву семян, опрыскиванию химикатами, сбору готовой продукции, ее сортировке и укладке в тару.
В животноводстве и птицеводстве требуются для выполнения следующих работ:
основные технологические операции: дозированная раздача кормов, разбрасывание подстилки, уборка навоза, дезинфекция помещений, взвешивание животных;
механизированное доение коров;
сортировка яиц в неорганизованных потоках с последующей укладкой в тару.
Большие перспективы имеет робототехника в медицине, хирургии, протезировании, для реабилитации и обслуживания больных и инвалидов. Создаются все более совершенные протезы рук и ног, имеющие приводы, встроенные микропроцессорные устройства управления и биологические обратные связи. Созданы искусственные скелеты с приводами - экзоскелетоны для парализованных людей. Сервисные роботы - для использования в домашнем хозяйстве, для уборки, на кухне, прислуживания за столом, охраны квартиры, выполнения работы швейцара. Имеют техническое зрение, обладают слухом, дистанционными и тактильными датчиками, могут вести диалог с человеком в объеме сотен фраз, снабжены системами радиоуправления и передвижения.
Билет №5.
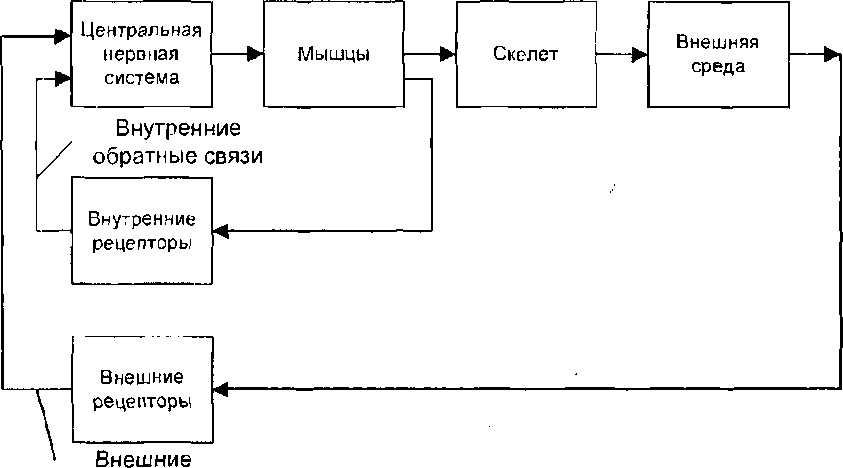
Общая схема управления движением человека.
Манипуляторы с угловой системой координат
1.
Обобщенная функциональная схема систем управления движениями тела человека, в которые входят пассивная часть — скелет, ее активная (движущая) часть — мышцы, чувствительные устройства рецепторы и информационно-управляющая система — центральная нервная система (ЦНС). Скелет (его часть, которая участвует в движении) представляет собой вместе с мышцами объект управления в виде подвижно соединенных костных звеньев, образующих с позиций механики многосменные кинематические цепи, подобные манипуляторам роботов. Управление этим объектом осуществляет ЦНС на основе информации, получаемой от рецепторов. Основное назначение этой системы управления— поддержание позы, ориентация (во внешней среде), перемещение тела в пространстве — локомоции и, наконец, манипуляции.
2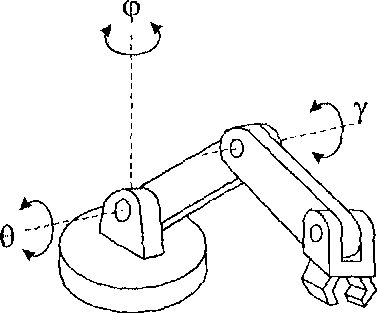 .
-
манипулятор с угловой системой
координат
.
-
манипулятор с угловой системой
координат
![]()
Рабочая зона
Манипулятор с угловой системой координат производит только угловые перемещения, т. е. все его звенья представляют собой шарниры. Часто такие манипуляторы называют шарнирными и антропоморфными. Роботы с такого типа манипуляторами благодаря возможности последних складываться, не выступая практически за габариты основания робота, обладают наибольшей компактностью, хотя и наиболее сложны в управлении..
Имеет всего по 3 переносных степени подвижности.