

Разработка функциональной схемы Обобщенная математическая модель системы управления вентильно индукторного привода ленточного конвейера.
Поставленные в работе задачи требуют разработки обобщенной динамической структурной схемы системы управления вентильно индукторного привода ленточного конвейера. Разработанная структурная схема представлена на рис. 5.2.в,г.
Контроллеры вентильно-индукторных электродвигателей
Эти двигатели очень похожи на шаговые в том смысле, что они точно так же требуют правильной электронной коммутации обмоток. Типичным способом реализации подобного коммутатора является мостовая схема, однако в данном случае имеются некоторые отличия. Используемая схема называется (N+1)‑полюсным транзисторно‑диодным несимметричным мостовым преобразователем (Рис. 6).
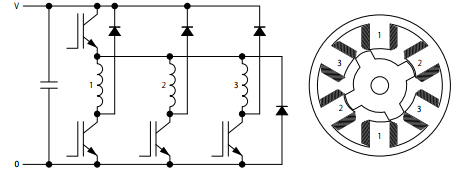
Рис. 6. (N+1)-полюсный диодно-транзисторный несимметричный мост для управления коммутируемым реактивным электродвигателем. Для управления IGBT-ключами требуется специальная схема управления, показанная на Рис. 8.
Она
позволяет коммутировать питание каждой
из трех фазных обмоток с помощью
общего верх‑него
МОП‑или
IGBT‑ключа
и нижних фазных ключей того же типа,
включаемых последовательно один за
другим (см. Рис. 8). После подачи питания
на обмотку ток в ней возра стает
до максимума, после чего обмотка
отключается верхним ключом. Этот режим
коммутации соответствует режиму
свободного вращения, когда за счет
индуктивности обмотки в ней протекает
почти постоянный ток, медленно спадающий
при открывании нижнего диода, замыкающего
цепь разряда обмотки. Для быстрого
разряда обмотки в процессе подготовки
к переключению питания на следующую
фазную обмотку выключают нижний ключевой
транзистор. При этом и к верхнему, и
к нижнему диоду оказывается приложено
открывающее напряжение, и ток в обмотке
спадает практически с той же скоростью,
с какой он нарастал при включении
обоих транзисторных ключей, разве что
спадает он несколько быстрее за счет
меньшего прямого сопротивления включенных
диодов. Такая конструкция коммутатора
позволяет быстро переключать обмотки,
особенно при использовании высоковольтных
источников питания, необходимых для
получения высокого крутящего момента
при большой скорости вращения. На Рис. 8.
показан только один канал усиления
сигнала токового датчика — для
верхнего МОП‑ключа.
стает
до максимума, после чего обмотка
отключается верхним ключом. Этот режим
коммутации соответствует режиму
свободного вращения, когда за счет
индуктивности обмотки в ней протекает
почти постоянный ток, медленно спадающий
при открывании нижнего диода, замыкающего
цепь разряда обмотки. Для быстрого
разряда обмотки в процессе подготовки
к переключению питания на следующую
фазную обмотку выключают нижний ключевой
транзистор. При этом и к верхнему, и
к нижнему диоду оказывается приложено
открывающее напряжение, и ток в обмотке
спадает практически с той же скоростью,
с какой он нарастал при включении
обоих транзисторных ключей, разве что
спадает он несколько быстрее за счет
меньшего прямого сопротивления включенных
диодов. Такая конструкция коммутатора
позволяет быстро переключать обмотки,
особенно при использовании высоковольтных
источников питания, необходимых для
получения высокого крутящего момента
при большой скорости вращения. На Рис. 8.
показан только один канал усиления
сигнала токового датчика — для
верхнего МОП‑ключа.
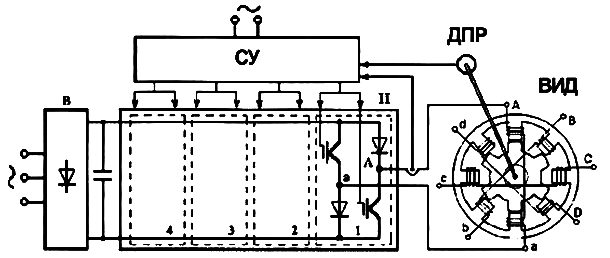
Рис. 7 Функциональная схема ВИП: В-выпрямитель, И-инвертор, СУ-система управления; ДПР-датчик положения ротора.

Рис. 8. Обобщенная динамическая структурная схема системы управления вентильно-индукторного привода ленточного конвейера
Требования к средствам автоматизации
Общими требованиями к перспективным ССО является: необходимость предоставления механику как оперативной, так и статистической информации о перемещаемом грузе, а также формирование упреждающих воздействий на РО на основе накопленной информации о параметрах груза.
Технически это может быть реализовано в настоящее время за счет введения в ССО блоков индикации, блоков оперативной памяти и специальных алгоритмов обработки информации.
Одним из вариантов перспективных ССО может служить система, обеспечивающая синхронизацию валов машин и датчиков положения, а так же требуются внешние устройства распределения нагрузок.
Для расчетной схемы, представленной на рис. 5.2, одним из алгоритмов функционирования такой системы может служить алгоритм, представленный в формуле (5.11), где для формирования управляющего воздействия, необходимо произвести вычисления:
Из этого выражения видно, что отношение моментов двигателей не зависит от величины нагрузки. Скорости валов двигателей автоматически меняются с изменением степени загрузки конвейера в соответствии с выражением.