

Технологические особенности автоматизации ленточного конвейера Математическая модель ленточного конвейера
Ленточный конвейер, оснащенный системой автоматического управления рабочим органом, грунт и микрорельеф обрабатываемой поверхности представляют в совокупности сложную динамическую систему. Оптимизацию параметров этой системы удобней вести на математических моделях.
Решение поставленных в работе задач требует составления уравнений геометрических связей автогрейдера, рассмотрения перемещения РО в пространстве под действием различных факторов, определения динамических характеристик объекта при различных возмущающих и управляющих воздействиях.
Рассмотрим схемы ВИД на примере использования их в качестве привода конвейеров(рис. 5.1). Двойной комплект электроприводов(рис. 5.1,а) обеспечивает пуск и изменение скорости движения ленты. Однако при этом требуются специальные устройства автоматического регулирования распределения нагрузок. Стоимость такой системы из-за100%-ного резерва высока. Так как привод шахтных ленточных конвейеров имеет относительно небольшую мощность и возможен пуск прямым подключением машины к сети, в100%-ном резерве нет необходимости.
При параллельном включении статоров СМ(рис. 5.1,б) преобразователи пропускают двойной ток. В случае использования данной схемы во всех режимах работы привода требуется специальная синхронизация валов машин и датчиков положения. Если применяется система, показанная на рис. 5.1,в, то нет необходимости в синхронизации валов, однако, так же, как и при реали-зации предыдущей схемы, требуются внешние устройства распределения нагрузок.
В
каскадном ВИД с последовательным
соединением обмоток статоров (рис.
5.1,г) осуществляется самовыравнивание
нагрузки, поскольку в фазных обмотках
СМ течет один и тот же ток. Помимо этого,
обеспечивается50%-ный  резерв
со стороны преобразователя, так как
второй инвертор может использоваться
в качестве выпрямителя. Такое решение
позволяет наиболее просто осуществить
экономичный режим работы конвейера,
заключающийся в поддержании постоянной
погонной нагрузки на уровне
номинальной(или площади поперечного
сечения груза на ленте) и расчетной
загрузки двигателей при одинаковых
коэффициентах сцепления и минимальном
натяжении ленты.
резерв
со стороны преобразователя, так как
второй инвертор может использоваться
в качестве выпрямителя. Такое решение
позволяет наиболее просто осуществить
экономичный режим работы конвейера,
заключающийся в поддержании постоянной
погонной нагрузки на уровне
номинальной(или площади поперечного
сечения груза на ленте) и расчетной
загрузки двигателей при одинаковых
коэффициентах сцепления и минимальном
натяжении ленты.
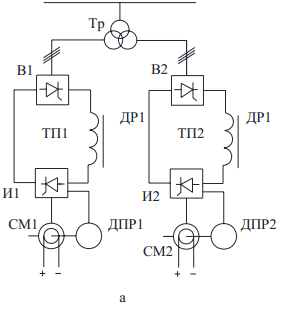


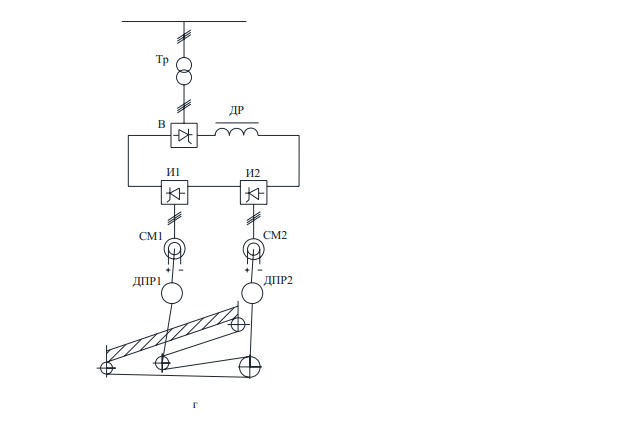
Рис. 5.1 Каскадные схемы электроприводов с ВИД
При условии равенства мощностей приводных двигателей для схемы, показанной на рис. 5.1,г, записываем следующие выражения
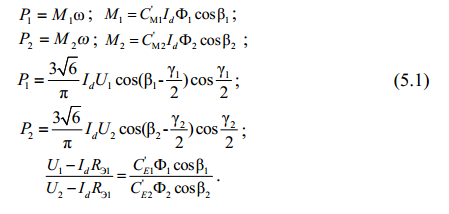
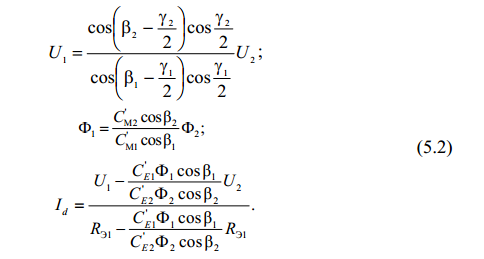
После несложных преобразований получаем систему уравнений, по которой выбираются параметры электрооборудования каскада
Исследованиями
установлено, что для обеспечения
оптимального тягового режима необходимо
регулировать текущее соотношение
скоростей в зависимости от степени
загрузки конвейера. Отличие реального
распределения нагрузок между машинами
от расчетного обусловлено механической
связью между валами посредством ленты.
Перераспределение нагрузок в процессе
работы конвейера зависит от деформации
ленты, изменения сил сцепления,
загрязнения поверхностей ленты и
барабана, а также от разброса параметров
электрических машин и кинематических
передач. 
Разность относительных скоростей машин при деформации лентыопределяется по формуле

где і, Р η - соответственно передаточное число и КПД редуктора; RБ- радиус тягового барабана; FЛ, ρЛ- площадь поперечного сечения и модуль упругости ленты.
Записываем следующие выражения для тока и моментов каскада
где Е1, Е2– ЭДС двигателей; R∑– суммарное сопротивление преобразовательной цепи.
Учитывая, что МC= М1+ М2, имеем
![]()
Используя выражение(5.3), находим
![]()
Решая совместно уравнения(5.6) и(5.7), получаем
Согласно выражениям(5.5) и(5.6) для моментов двигателей записываем

Из этих выражений видно, что отношение моментов двигателей не зависит от величины нагрузки. Скорости валов двигателей автоматически меняются с изменением степени загрузки конвейера в соответствии с выражением

Однако их сумма всегда остается постоянной


что вытекает из баланса мощностей.
Из формул(5.8) и(5.9) видно, что при увеличении модуля упругостиленты скорость первого приводного двигателя увеличивается, а второго– падает. Максимальное значение ω1 определяется скоростью идеальногохолостого хода при Id= 0.
Отсюда минимально допустимое значение модуля упругости, при ко-тором выполняется распределение нагрузок, находим из выражений(5.4) и(5.8)

При дальнейшем уменьшении модуля упругости система не сможет обеспечить автоматическое распределение нагрузок. В этом случае необходимо увеличить напряжение на выходе выпрямительного агрегата. Самокомпенсация распределения нагрузок будет выполняться при любой скорости движения ленты. Однако следует помнить, что в случае использования ленты со значи-тельной деформацией необходимо иметь соответствующий регулировочный запас по напряжению.
Таким образом, каскадный ВИД постоянного тока с последовательным соединением обмоток статоров удовлетворяет всем технологическим требованиям, предъявляемым к регулируемым многодвигательным электроприводам шахтных стационарных установок. В нем происходит самораспределение моментов, такой привод нечувствителен к изменению статической нагрузки и параметров рабочей машины.
Типы сравниваемых электроприводов представлены на рис. 5.2, а в табл. 5.1 приведены их краткие технические характеристики.
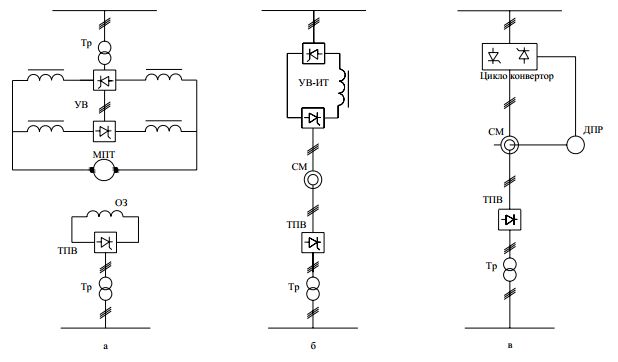
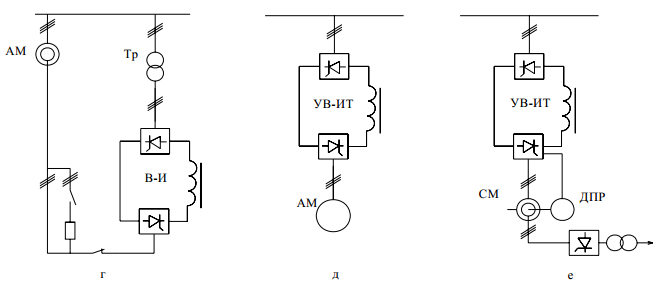
Рис. 5.2 Схемы сравниваемых электроприводов: а- ВП; б, д- ЧРП; в– ВИД переменного тока; г- АВК; е- ВИД постоянного тока
Из табл. 5.1 видно, что ВИД является одним из наиболее универсальных типов регулируемого привода, технические характеристики которого лучше аналогичных характеристик каждой из существующих систем.
Таблица5.1
Краткие технические характеристики сравниваемых электроприводов



Таким образом, по режимам работы ВИД не уступает приводу постоянного тока и частотному, выгодно отличаясь от них практически неограниченным диапазоном мощностей и частот вращения, большей надежностью и простотой.
Универсальность ВИД проявляется также в возможности реализации каскадных многодвигательных схем. Например, условиям экономичного режима работы конвейеров наболее полно отвечают каскадные ВИД, которые характеризуются простотой реализации пуска и регулирования частоты вращения, в них осуществляется самокомпенсация неравенства распределения нагрузок.