

Специальные, специализированные и универсальные роботы
По ширине операций, для выполнения которых предназначен робот, различаются работы специальные, специализированные и универсальные роботы.
Специальные роботы предназначены для выполнения одной конкретной технологической операции (например, сварка, нанесение покрытий и т.д.) Специализированные роботы могут выполнять несколько однотипных операций (сборочный робот со сменными рабочими инструментами, робот для обслуживания определенного типа технологического оборудования).
Универсальные роботы могут выполнять различные основные и вспомогательные операции в пределах их технических возможностей. Увеличение степени универсальности робота расширяет область его возможных применений, но одновременно неизбежно сопровождается недоиспользованием этих возможностей на каждой конкретной операции, а также удорожанием робота. Оптимальными в этом отношении являются специальные роботы, но с другой стороны это предельно сужает их рынок, а следовательно и объем производства.
Билет №11
Состав роботов.
Робот, как машина состоит их двух основных частей – исполнительных систем и информационно-управляющей системы с сенсорной системой. В свою очередь исполнительные системы включают манипуляционную систему (обычно в виде механических манипуляторов) и системы передвижения, имеющиеся только у мобильных (подвижных) роботов.
Рис. функциональная схема.
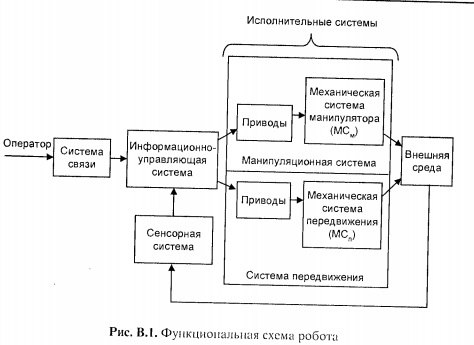
Исполнительная система: манипуляционная система и система передвижений.
Манипуляторы.
Манипулятор — это механизм для управления пространственным положением орудий и объектов труда.
Манипуляторы включают в себя подвижные звенья двух типов
звенья, обеспечивающие поступательные движения
звенья, обеспечивающие угловые перемещения
Сочетание и взаимное расположение звеньев определяет степень подвижности, а также область действия манипуляционной системы робота. Для обеспечения движения в звеньях могут использоваться электрические, гидравлический или пневматический привод.
Частью манипуляторов (хотя и необязательной) являются захватные устройства. Наиболее универсальные захватные устройства аналогичны руке человека — захват осуществляется с помощью механических «пальцев». Для захвата плоских предметов используются захватные устройства с пневматической присоской. Для захвата же множества однотипных деталей (что обычно и происходит при применении роботов в промышленности) применяют специализированные конструкции.
Вместо захватных устройств манипулятор может быть оснащен рабочим инструментом. Это может быть пульверизатор, сварочная головка, отвёртка и т. д.
Система передвижений.
Внутри помещений, на промышленных объектах используются передвижения вдоль монорельсов, по напольной колее и т. д.
Для перемещения по наклонным, вертикальным плоскостям используются системы аналогичные «шагающим» конструкциям, но с пневматическими присосками.
Информационно-управляющая система.
Управляющая система — это «мозг» робота. Служит для выработки закона управления приводами (двигателями) механизмов исполнительной системы на основе сигналов обратной связи от сенсорной системы, а также для организации общения робота с человеком на том или ином языке. Интеллектуальные способности робота зависят прежде всего от алгоритмического и программного обеспечения его управляющей системы.
Обычно реализуется на базе управляющих ЭВМ, имеющих большой ассортимент входных и выходных преобразователей и каналов связи (от нескольких десятков до нескольких тысяч), по которым, как по нервной системе, могут передаваться дискретные и непрерывные сигналы. Такие ЭВМ строятся в малогабаритном, транспортабельном исполнении и обладают повышенной надежностью.
Управление бывает нескольких типов:
Программное управление — самый простой тип системы управления, используется для управления манипуляторами на промышленных объектах. В таких роботах отсутствует сенсорная часть, все действия жёстко фиксированы и регулярно повторяются. Для программирования таких роботов могут применяться среды программирования типа VxWorks/Eclipse или языки программирования например Forth, Оберон, Компонентный Паскаль, Си. В качестве аппаратного обеспечения обычно используются промышленные компьютеры в мобильном исполнении PC/104 реже MicroPC. Может происходить с помощью ПК или программируемого логического контроллера.
Адаптивное управление — роботы с адаптивной системой управления оснащены сенсорной частью. Сигналы, передаваемые датчиками, анализируются и в зависимости от результатов принимается решение о дальнейших действиях, переходе к следующей стадии действий и т. д.
Основанное на методах искусственного интеллекта.
Управление человеком (например, дистанционное управление).
Система связи организует обмен информацией между роботом и человеком или другими роботами. Цель такого обмена — формулировка человеком заданий роботу, организация диалога между человеком и роботом, контроль за функционированием робота, диагностика неисправностей и регламентная проверка робота и т. п.
Обычно информация от человека поступает к роботу через устройство ввода или пульт управления. Если раньше чаще всего использовалось физические воздействия (например, нажатие человеком кнопки), то сейчас все шире применяется речевое общение.
От робота к человеку информация, как правило, передается в форме световых и звуковых сигналов. Носителями этой информации являются табло, цифровые индикаторы, дисплеи, телекамеры и т. п. Можно предположить, что в ближайшем будущем общаться с роботом (и с компьютером вообще) можно будет на естественном человеческом языке.
Сенсорная система — это искусственные органы чувств робота. Как и человеческие, предназначены для восприятия и преобразования информации о состоянии внешней среды и самого робота.
В качестве элементов сенсорной системы робота обычно используются телевизионные и оптико-электронные устройства, лазерные и ультразвуковые дальномеры, тактильные и контактные датчики, датчики положения, тахометры, акселерометры, гироскопы и т. п.