

2) Искусственные мышцы
Современные приводы по своим массогабаритным параметрам на порядок уступают поперечнополосатым мышцам животных и человека.
Первыми разработками приводов, получивших название искусственная мышца, пневматические приводы, в которых цилиндр с поршнем заменялся эластичной трубкой в оплетке крест-накрест. При подаче в трубку воздуха под давлением она, она сокращается до 1/3 длины, имитируя работу мышцы. Такие приводы имеет массу в 3-4 раза меньшую, чем пневматические цилиндры той же мощности.
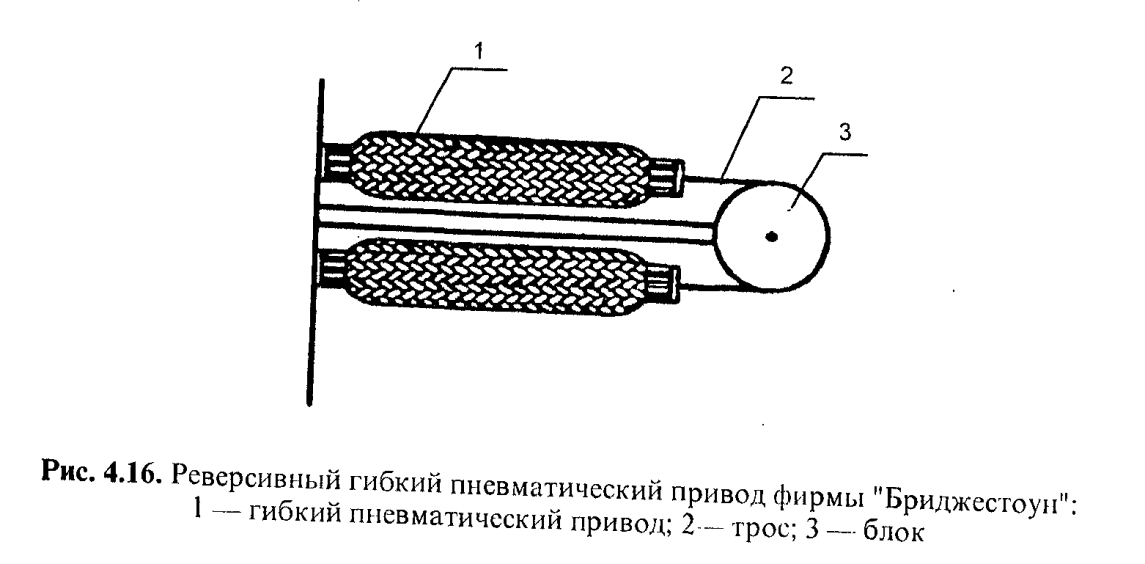
Устройство состоит из 2 пневматических приводов одностороннего действия. При повышении давления в одном из них и одновременном понижении на ту же величину в другом первый привод сокращается, удлиняя второй. В результате через трос происходит поворот блока, которой связан со звеном манипулятора. Угол поворот блока практически прямо пропорционален разности давлений в приводах.
Также есть мышцы, которые тоже состоят из эластичных материалов, но вних уже есть газ и он нагревается за счет тока. Газ расширяется или сужается – так мышца работает.
Электромагнитная искусственная мышца состоит из многовитковой обмотки, сжатой в жгут, в которой проводники с электрическим током противоположного направления прижаты друг другу. При пропускании по ним тока они вследствие электромагнитного силового взаимодействия расходятся в поперечном направлении. В результате длинна жгута сокращается.
В последнее время значительные успехи достигнуты в разработке электростатических искусственных мышц из полимеров деформирующихся в электрическом поле. Так, силиконовые и акриловые пластины толщиной в десятки мкм под действием напряжения а несколько кВ расширяются перпендикулярно полю более чем вдвое, создавая усилия в десятки Н.
Есть разработки, где используются химические реакции, но там скорость намного меньше.