

Вопрос 2. Манипуляторы с цилиндрической системой координат.
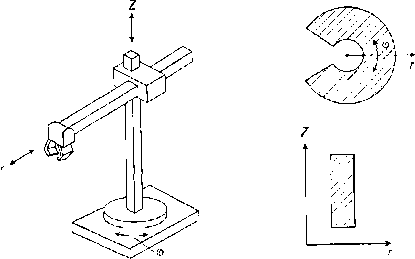
Наряду с поступательными перемещениями осуществляется одно угловое перемещение (по окружности). Соответственно, рабочая зона ограничена цилиндрическими поверхностями.
Билет 21.
Назначение сенсорных систем.
Классификация технологических комплексов с роботами на основных технологических операциях.
Ответы:
Вопрос 1. Сенсорные системы предназначены для получения информации о внешней среде и положении робота в ней. По свойствам и параметрам сенсорные системы можно разделить на следующие 3 группы:
Системы, дающие общую картину окружающей среды с последующим выделением отдельных объектов, значимых для выполнения роботом его функций.
Системы, определяющие различные физико-химические свойства внешней среды и ее объектов.
Системы, определяющие координаты местоположения робота и параметры его движения, включая его координаты относительно объектов внешней среды и усилия взаимодействия с ними.
Первая группа - системы технического зрения и различного типа локаторы. Вторая группа наиболее многообразна. Это измерители геометрических параметров, плотности, температуры, оптических свойств, химического состава и т. д. Третья группа определяет параметры, относящиеся к самому роботу. Это измерители его географических координат в пространстве от спутниковых систем до использующих магнитное поле Земли, измерители угловых координат (гироскопы), измерители перемещения и скорости…
В составе робота все эти сенсорные системы ориентированы на обслуживание 2 исполнительных систем — передвижения и манипуляциоппой. Основные требовании к сенсорным системам — дальность действия, точность, быстродействие и т. д.
Сенсорные системы, используемые в системах передвижения робота, подразделяются на системы, обеспечивающие навигацию в пространстве и системы, обеспечивающие безопасность движения (предотвращение столкновений с препятствиями и опрокидываний на уклонах и т. п.).
Сенсорные системы, обслуживающие манипуляторы, тоже образуют две подгруппы: системы, входящие в контур управления движением манипулятора, и системы, очувствления его рабочего органа (входят размещенные у рабочего органа манипулятора системы технического зрения и измерители усилий).
Контактные сенсорные системы - для очувствления рабочих органов манипуляторов и корпуса мобильных роботов. Они позволяют фиксировать контакт с объектами внешней среды (тактильные сенсоры), измерять усилия, возникающие в месте взаимодействи, определять проскальзывание объектов при их удержании захватным устройством. Они накладывают существенные ограничения на динамику и прежде всего на быстродействие управления роботом.
Тактильные сенсоры помимо получения информации о контакте применяются и для определения размеров объектов (путем их ощупывания). Они реализуются с помощью концевых выключателей, герметизированных магнитоуправляемых контактов, на основе токопроводящей резины ("искусственная кожа") и т. д. Важным требованием является высокая чувствительность (срабатывание при усилии в единицы и десятки грамм), малые габариты, высокая механическая прочность и надежность.
Сенсорные системы ближнего действия обеспечивают получение информации об объектах, расположенных на расстояниях, соизмеримых с их размерами. К таким системам относятся оптические локаторы, дальномеры, дистанционные измерители плотности грунта п т. п. Позволяют роботу выполнять задание с большей скоростью, выдавая информацию о различных объектах до соприкосновения с ними.
Сенсорные системы дальнего действия служат для получения информации о внешней среде в объеме всей рабочей зоны манипуляторов роботов и окружающей среды мобильного робота. К ним относятся различные навигационные системы, локаторы и другие сенсорные системы соответствующей дальности действия.
В бесконтактных сенсорных системах для получения требуемой информации используются излучаемые ими специальные сигналы (оптические, радиотехнические, ультразвуковые и т. д.) и естественные излучения среды и ее объектов. В зависимости от этого различают активные и пассивные сенсорные системы. Активные сенсорные системы имеют передатчик, излучающий первичный сигнал, и приемник, регистрирующий прошедший через среду прямой сигнал или вторичный сигнал, отраженный от объектов среды. Пассивные системы имеют, естественно, только приемное устройство, а роль излучателя играют сами объекты внешней среды. Поэтому пассивные сенсорные системы технически обычно проще и дешевле активных, но менее универсальны.
В настоящее время для очувствления роботов наиболее широкое применение получили системы технического зрения, локационные и тактильные. Наиболее универсальными из них являются системы технического зрения. По сравнению со зрением живых организмов задачи технического зрения проще, так как для них, как правило, существенно более ограничен и заранее известен перечень объектов внешней среды, с которыми предстоит иметь дело.
Конструктивно сенсорные устройства размещают на рабочих органах манипуляторов (устройства ближнего действия), на корпусе робота или вне робота (устройства дальнего и сверхдальнего действия).