

Вопрос 2. Компоновки технологических комплексов с роботами.
В отличие от простейших комплексов в виде технологической ячейки, роботизированным участкам линиям и цехам присущи принципиально новые качества. Прежде всего — наличие транспортно-складской системы и единой системы управления. Эти системы материально и информационно связывают отдельные технологические ячейки, автоматизированные склады (материалов, заготовок, инструмента) и другие части комплекса в одну согласованно действующую систему. Кроме того, такие комплексы должны включать помимо систем управления в реальном времени непосредственно технологическим оборудованием расположенные над ними уровни иерархии управления, решающие задачи программирования и оперативно-календарного планирования (сменного, суточного, недельного и т. д.).
На рис. 14.1 показан пример простой линейной компоновки однопоточной роботизированной технологической линии холодной штамповки с непосредственной связью между составляющими линию ячейками. В ней отсутствует межоперационная транспортная система, а предметы производства передаются от одной ячейки к другой непосредственно входящими в них вспомогательными ПР. Такие линии с непосредственной жесткой связью между ячейками просты, однако требуют строго определенного взаимного расположения основного технологического оборудования.
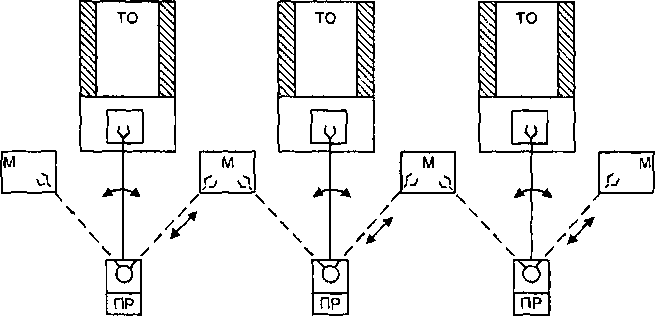
Рис.
14.1. Схема однопоточной роботизированной
технологической линии холодной штамповки
с линейной компоновкой: ТО — основное
технологическое оборудование; ПР —
промышленный робот; М — магазин поштучной
выдачи заготовок.
Билет 17.
Рабочие органы манипуляторов.
Классификация технологических комплексов с применением роботов.
Ответы:
Вопрос 1.Рабочие органы манипуляторов служат для непосредственного взаимодействия с объектами внешней среды и делятся на захватные устройства и специальный инструмент. Рабочие органы могут быть постоянными и съемными, в том числе с возможностью их автоматической замены в ходе выполнения технологической операции.
Захватныеустройства.Предназначены для того, чтобы брать объект, удерживать его в процессе манипулирования и освободить по окончании этого процесса. Существуют следующие основные типы захватных устройств: механические устройства-схваты, пневматические и электромагнитные.
Слеши — это механическое захватное устройство, аналог кисти руки человека. Самые простые двухпальцевые схваты напоминают обычные плоскогубцы, но снабженные приводом. (есть с пневматическим приводом). В зависимости от объектов манипулирования применяют схваты с 3, 4 и реже с большим числом пальцев. Пример: сложный схват с 3 пальцами, каждый из которых имеет по 3 подвижных звена и может также поворачиваться относительно продольной оси. Однако в связи с простотой совершаемых схватами движений ("зажим-разжим") в них обычно используются нерегулируемые пневматические и электрические приводы, значительно реже — гидравлические.
Схваты часто очувствляют с помощью контактных датчиков, дистанционных датчиков (ультразвуковых, оптических и др.), выявляющих предметы вблизи схвата и междуегопапьцами.
Магнитные захватные устройства используются для взятия ферромагнитных объектов. В роботах нашли применение в основном захватные устройства с электромагнитами, но имеются устройства и с постоянными магнитами.
Захватные устройства бывают универсальными и специальными (для работы с хрупкими и протяженными предметами, тканями и т. д.).
Захватные устройства часто присоединяют к последнему звену манипулятора через промежуточные, податливые конструктивные элементы.
Рабочий инструмент. В случаях, когда объектом манипулирования является рабочий инструмент, с помощью которого робот выполняет определенные технологические операции (нанесение покрытий, сварка, завинчивание гаек, зачистка поверхностей и т. п.), этот инструмент, как правило, не берется захватным устройством, а непосредственно крепится к манипулятору вместо него. Часто при этом к инструменту необходимо обеспечить подвод энергии или какого-либо рабочего тела. Для окрасочного робота — это краска и воздух к пульверизатору, для сварочного робота — сварочный ток к сварочным клещам при точечной сварке или проволочный электрод, газ и охлаждающая вода при дуговой сварке и т. д. Для этого требуется разработка специальной конструкции всего манипулятора.