

50.Приборные рычажные механизмы.Основные сведения и области применения
механизм, состоящий из звеньев, соединённых между собой в низшие кинематические пары.Рычажный механизм бывают плоские и пространственные.В плоских звенья соприкасаются по окружности (шарниры, вращательные пары) и по линии (поступательные пары). В пространственном звенья соединяются по цилиндрическим или сферическим поверхностям (вращательные пары) и по плоскости (поступательные пары).Рычажный механизм проще в изготовлении, прочнее и более износостойки, чем кулачковые и зубчатые механизмы, поэтому Рычажный механизм применяют для передачи больших усилий в прессах, ковочных машинах, двигателях внутреннего сгорания, погрузчиках и т. п.
51.Кинематические соотношения в рычажных механизмах(o_o)
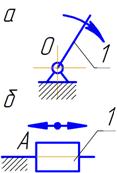
Рычажными называют механизмы с геометрическим замыканием звеньев, которые не содержат кинематических пар четвертого класса.Структура, т. е. строение механизмов, имеет очень большое значение как при синтезе механизма, помогая наиболее рационально сконструировать его для осуществления требуемого движения выходного звена, так и при анализе механизмов для выбора соответствующих методов исследования.Классификация:механизмы объединяют в классы. Механизм первого класса состоит из входного звена: кривошипа (или ползуна) и стойки, соединенных кинематической парой пятого класса (рис. 1.5). Степень подвижности механизма первого класса W = 1. Это механизмы роторных приборов (гироскопов, электродвигателей и генераторов), поршневых машин и др. Механизмы более высоких классов образуют последовательным присоединением к начальному механизму кинематических цепей, не изменяющих степень подвижности исходного механизма, т. е. имеющих степень подвижности, равную нулю.Кинематическая цепь, которая, будучи присоединенной свободными элементами пар к стойке, обладает нулевой степенью подвижности, называется структурной группой Ассура. Условие существования группы:W = 3n – 2p5 = 0,откуда p5 = 3n / 2.Так как число звеньев n и число кинематических пар p5 могут быть только целыми, то условию удовлетворяют кинематические цепи, состоящие из четного числа звеньев и кратному трем числа кинематических пар. Простейшая из них имеет два звена и три кинематические пары.Структурные группы подразделяют на классы и порядки. Группа II класса состоит из двух звеньев и трех кинематических пар. Свободные элементы звеньев (поводки) предназначены для присоединения группы к другим звеньям механизма. Звенья этой группы могут образовывать с другими звеньями механизма вращательные или поступательные пары. На рис показано 5 видов (модификация) групп IIкласса 2-го порядка, получаемых путем замены вращательных пар (В) на поступательные (П).Cтруктурные группы более высоких классов получают путем добавления к простой группе двух звеньев и трех кинематических парю
Порядок группы определяется числом свободных элементов (поводков), которыми группа может быть присоединена к другим звеньям. Класс и порядок механизма в целом определяется классом и порядком наиболее сложной структурной группы, входящей в него.
|
|
Механизмы первогокласса. |
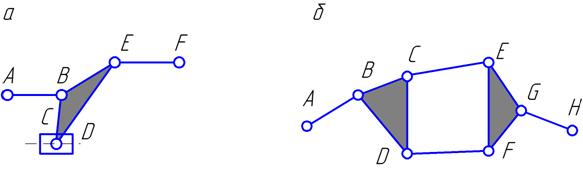
Структурные группы 3-го и 4-го классов
|
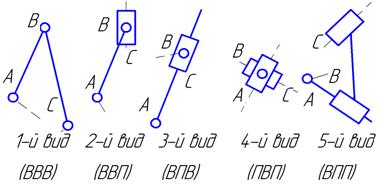
Структурные группы II класса 2-го порядка