23. Кинетическая энергия механизма. Приведенная масса. Приведенный момент инерции.
В
общем случае плоскопараллельного
движения звена его кинетическую энергию
можно представить в виде суммы энергий
в поступательном вместе с центром масс
и вращательном вокруг центра масс
движениях.
 )
)
mi – масса звена i, vi – скорость его центра масс, Ji – его момент инерции относительно оси, проходящей через центр масс, ωi – его угловая скорость.
Рассмотрим, как подсчитывается кинетическая энергия отдельных звеньев в зависимости от вида их движения. Поступательное движение: T=mV2s/2, где m - масса звена;Vs - скорость центра масс поступательно движущегося звена. Вращательное движение:T= Jw2/2,где J - момент инерции звена относительно оси вращения;w- угловая скорость звена. Сложное плоскопараллельное движение:T= Jpw2/2, где Jp - момент инерции звена относительно оси, проходящей через мгновенный центр вращения р; w - мгновенная угловая скорость звена.wLps=Vs - скорость центра масс звена, получаем формулу для кинетической энергии звена, имеющего сложное вращательно-поступателыюе движение: T= Jsw2/2+ mV2s/2. Складывая алгебраически кинетические энергии отдельных звеньев, получаем значение кинетической энергии всего механизма: Mп=m1(V1/Vв)2+J1(w1/ Vв)2+m2(V2/ Vв)2+ J2(w2/ Vв)2+…+ mn(Vn/ Vв)2+ Jn(wn/ Vв)2; Jп=m1(V1/w1)2+J1(w1/w1)2+ m2(V2/w1)2+ J2(w2/w1)2+…+ mn(Vn/w1)2+ Jn(wn/w1)2;
Приведенная масса представляет собой некоторую условную массу, сосредоточенную в точке, кинетическая энергия которой равна в каждом рассматриваемом положении кинетической энергии механизма, т.е. сумме кинетических энергий всех его звеньев. В общем случае приведенная масса переменна и зависит от квадратов отношений линейных и угловых скоростей, и поэтому она всегда положительна.
Приведенный момент инерции звеньев механизма – это есть момент инерции вращающегося вместе со звеном тела, кинетическая энергия которого в каждом рассматриваемом положении механизма равна сумме кинетических энергий всех его звеньев.
24. Уравнение движения механизма в дифференциальной форме.
Обозначим разность приведенных силы движущей Fд и силы сопротивления Fс через F, т. е. F = Fд— Fc. Тогда уравнению кинетической энергии можно придать вид dA = Fds = dT или F=dA/ds=dT/ds ,где dA - элементарная работа приведенной силы, ds - элементарное перемещение точки приведения; dT - элементарное приращение кинетической энергии агрегата. Подставляя в уравнение значение кинетической энергии, получаем F = Fд— Fc= dT/ds=d(mпV2/2)/ds,где mп — приведенная масса, в общем случае переменная и являющаяся функцией пути s. Поэтому уравнение принимает вид
F= Fд— Fc=mпdV/dt+V2/2*dmп/ds. Другой вид уравнению движения механизмов машинного агрегата можно придать, если воспользоваться приведенным моментом М = Мд— Мс, приведенным моментом инерции Jп и угловой скоростью w звена приведения. Имеем тогда
M= Мд— Мс= Jп*dw/dt+w2/2*d Jп/dϕ, где ϕ - угол поворота звена приведения.
M= Мд— Мс=dT/dϕ=d(Jп w2/2)/dϕ.
25. Неравномерность движения ведущего звена механизма. Коэффициент неравномерности движения.
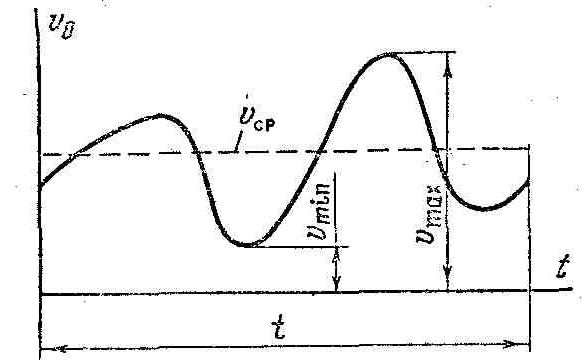
В общем случае скорости ведущего звена механизма, при установившемся движении механизма, являются величинами переменными. Колебания скоростей ведущего звена вызывают в кинематических парах дополнительные динамические давления, понижающие общий коэф.полезного действия машины и надежность ее работы. Эти колебания в некоторых случая могут вызвать значительные упругие колебания в звеньях механизма. Колебания бывают двух типов. Периодические колебания скоростей механизма – это колебания, при которых скорости всех звеньев механизма имеют вполне определенные циклы, по истечении которых эти скорости принимают каждый раз свои первоначальные значения. Непериодические колебания скоростей, вызываются различными причинами: внезапным изменением полезных или вредных сопротивлений, включением в механизм дополнительных масс и т. д. Такое внезапное изменение нагрузки на механизм вызывает внезапное увеличение или уменьшение скорости его начального звена, и т.к. эти колебания скорости в некоторых случаях не имеют определенного цикла, то такие колебания скорости начального звена назовем непериодическими. Во многих механизмах есть оба вида колебания скоростей.
Колебания скоростей во время установившегося движения могут достигнуть такой величины, которая не будет допустимой с точки зрения обеспечения всех надлежащих условий работы механизма. Необходимо регулирование в заранее заданных пределах величин этих колебаний. Регулирование периодических колебаний скоростей при установившемся движении механизма обычно выполняется соответствующим подбором масс его звеньев так, чтобы они могли аккумулировать все приращения кинетической энергии механизма, имеющие место при превышении работы движущих сил над силами сопротивления. При значительных непериодических колебаниях скоростей задача о регулировании решается установкой специальных механизмов, регулирующих законы изменения или движущих сил, или сил сопротивления. Такие регулирующие механизмы получили название регуляторов.
Если разность макс-го и миним-го значений скорости точки В разделить на среднюю скорость, то получим - коэффициент неравномерности движения механизма
δ=ʋМАКС-ʋМИН/ʋСР