9.Кинематический анализ зубчатых механизмов.
Задача: определение передаточных отношений между их звеньями.
Передаточным отношением называется отношение угловой скорости ведущего звена к угловой скорости ведомого. u12=w1/w2.
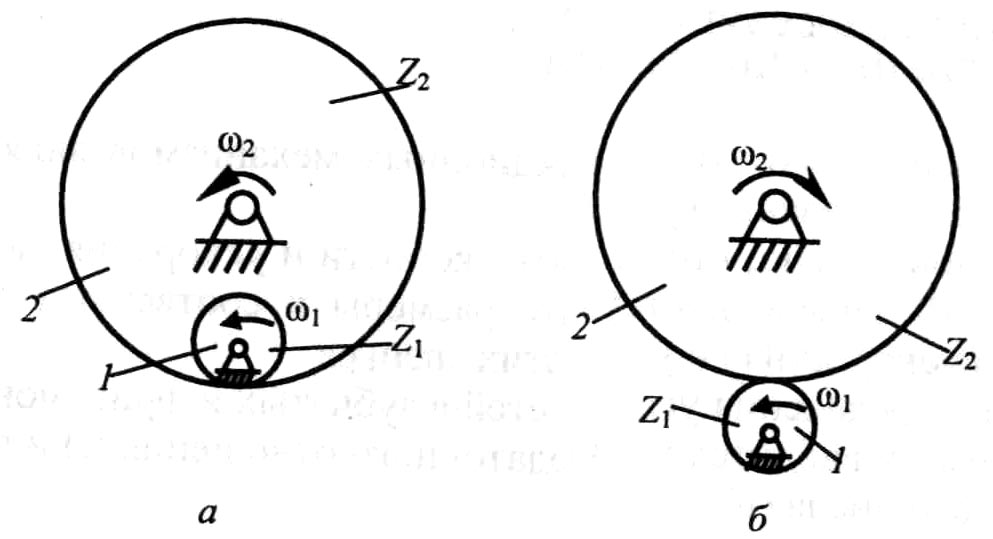
Для внутреннего зацепления u12= z2/z1; внешнего зацепления u12= - z2/z1.
Зубчатая передача-трехзвенный механизм, состоящий из стойки и двух зубчатых колес.
Зуб.передачи разделяются по расположению осей зубчатых колес в пространстве: 1) оси параллельны (цил.зуб.передачи с внешним зацеплением u12= -z2/z1; цил.зуб. передача с внутренним зацеплением u12= z2/z1; реечная передача ʋ2=ω1r1); 2) оси пересекаются (коническая зуб.передача u12= z2/z1); 3) оси перекрещиваются (зуб.передача с винтовыми зубьями u12= z2/z1; червячная передача u12= z2/z1)
10.Определение передаточного отношения зубчатых механизмов с неподвижными осями колес.
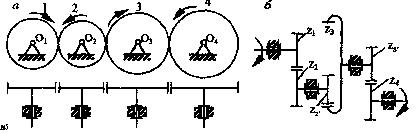
Передаточное отношение многоступенчатой передачи равно произведению передаточных отношений отдельных ее ступеней.
Многоступенчатую передачу, сост. из ряда одноступенчатых передач, называют рядовой. В рядовой передаче геометрические оси всех зубчатых колес неподвижны. Передача, в которой промежуточные колеса имеют попарно общую ось вращения, называют рядовой с кратным зацеплением. Передаточное отношение рядовых зубчатых соединений равно произведению передаточных отношений соседних ступеней. u14= u12+ u23+ u34=(- z2/z1)(- z3/z4)(- z4/z3)= - z4/z1.
(u1n=(-1)k zn/z1 , k-число внешних зацеплений).
11. Определение передаточного отношения эпициклических зубчатых механизмов. Формула Виллиса.
З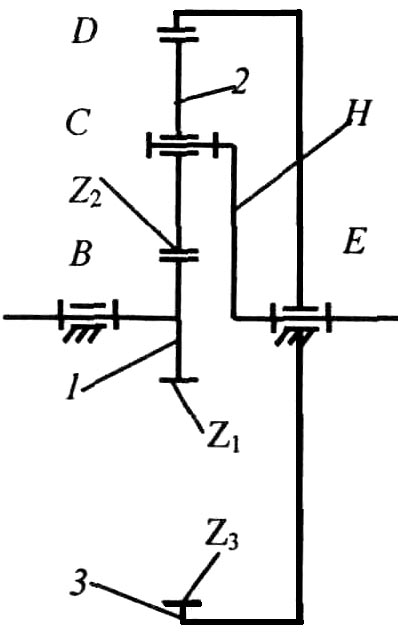 убчато-рычажный
механизм, у которого оси некоторых колес
подвижны, называют эпициклической
передачей. Эпициклические передачи
разделяются на планетарные зубчатые
механизмы (с одной степенью подвижности)
и дифференциальные зубчатые механизмы
(с двумя и более). В кинематической схеме
планетарного механизма обязательно
есть одно неподвижное зубчатое колесо.
убчато-рычажный
механизм, у которого оси некоторых колес
подвижны, называют эпициклической
передачей. Эпициклические передачи
разделяются на планетарные зубчатые
механизмы (с одной степенью подвижности)
и дифференциальные зубчатые механизмы
(с двумя и более). В кинематической схеме
планетарного механизма обязательно
есть одно неподвижное зубчатое колесо.
А,В,С,D,Е - кинематические пары; 1-центральное (солнечное) колесо;
2-сателлит; H-поводок(водило);3-центральное зубчатое колесо с внутренним зацеплением. Передаточное отношение планетарных механизмов можно определить аналитическим методом Виллиса. Для остановки водила всем звеньям планетарного мех-ма мысленно сообщается дополнительная угловая скорость. В результате такого действия получается мех-м, у которого геометрические оси всех зубчатых колес будут неподвижными (обращенный мех-м). u13H=w1’/w3’=(w1-wH) / (w3-wH); w3=0; u13H=(w1-wH) / (- wH)=1- w1/wH=1- u1H3;( u1H3- передаточное отношение планетарного мех-ма от звена 1 к звену Н при неподвижном звене 3); u1H3=1- u13H; u13H=u12*u23= - z2z3 / z1z2= - z3 / z1; u1H3=1+ (z3 / z1).
12.Кулачковые механизмы. Типы.
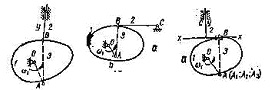
Плоские трехзвенные кулачковые механизмы состоят из стойки и двух подвижных звеньев, образующих с ней низшие кинематические пары (вращательные или поступательные), а друг с другом — высшую кинематическую пару. Ведущее звено в кулачковом механизме называют кулачком, ведомое — толкателем. Элемент высшей кинематической пары, принадлежащий кулачку, называют профилем кулачка, а толкателю - профилем толкателя.
Iтип(ведомое звено движется поступтельно): кул. мех-м состоит из кулачка 1 и толкателя 2, совершающего прямолинейное возвратно-поступательное движение. Во время движения механизма толкатель касается кулачка точкой В. Если центр вращения кулачка лежит на продолжении прямолинейной траектории точки В толкателя, то кулачковый механизм называют центральным, если не лежит на этой прямой - внецентренным. Расстояние от центра вращения кулачка до траектории точки В толкателя называют эксцентриситетом. IIтип(ведомое звено вращается): рычажный (коромысловый) состоит из кулачка и толкателя (рычага-коромысла), который касается кулачка во время движения точкой В и совершает колебательное вращательное движение вокруг неподвижной точки С. ВС - длина толкателя. III тип (ведомое звено совершает сложное движение): состоит из кулачка и толкателя. Толкатель совершает прямолинейное возвратно-поступательное движение и касается кулачка во время движения различными точками своего прямолинейного профиля.