

Методы математического описания сау. Передаточная функция
Поведение АСР в процессе функционирования представляет собой сочетание статических и динамических режимов. Для синтеза АСР и еѐ отдельных элементов, а также исследования их характеристик необходимо иметь уравнения, связывающие входные и выходные параметры. Различают статическую и динамическую модели (характеристики).
Статические характеристики АСР.
Статическая
модель описывает поведение системы
в равновесном состоянии:
![]() ,
где у
–
выходная величина, х
– входная величина.
,
где у
–
выходная величина, х
– входная величина.
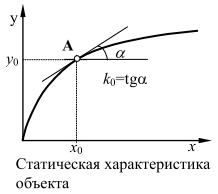
В общем случае функция (*) нелинейна, поэтому ее линеаризуют, раскладывая в ряд Тейлора в окрестностях рабочей точки:

Оставляя только линейные члены ряда можно записать:
![]()
где  - коэффициент передачи объекта.
- коэффициент передачи объекта.
Если выходная величина объекта зависит от нескольких входных воздействий, то при линеаризации по методу малых приращений следует определять частные производные по всем воздействиям, а приращение выходной величины является суммой частных приращений входных воздействий, т.е:
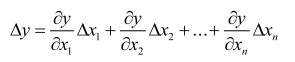
где Δx1 , Δx2 , …, Δxn – приращения входных воздействий.
Динамические характеристики.
Динамические характеристики элементов АСР описываются 2-мя способами: 1) Дифференциальные уравнения 2) Передаточные функции (последовательное соединение звеньев, параллельное соединение звеньев, замкнутая обратная связь)
Динамическая модель описывает изменение входных и выходных величин во времени. Если объект имеет один выход, то динамическая модель в общем случае имеет вид:

где y(t), x(t) – выходная и входная величины; ai и bi , – постоянные коэффициенты; n – порядок уравнения, при этом n ≥ m – условие физической реализуемости элемента.
Если входных величин несколько – то они и их производные записываются в правой части уравнения.
Если объект имеет k выходов, то его динамика описывается системой k дифуравнений.
Динамические характеристики рассматривают при трех стандартных
входных воздействиях:
- единичном ступенчатом – 1(t),
- единичном импульсном – δ(t),
- периодическом (синусоидальном).
В первых двух случаях полученные характеристики называются временными, в третьем – частотными. По временным характеристикам определяют качество регулирования.
Уравнения динамики решаются классическим или операторным методами. Классический метод применяют для решения линейных уравнений, если их порядок не превышает трех, а правая часть выражается простой функцией – константой или синусоидой. В этом случае общее решение уравнения динамики (неоднородное дифуравнение) представляет собой сумму общего решения соответствующего однородного уравнения и частного решения неоднородного уравнения. Однородное уравнение характеризует поведение системы, предоставленной самой себе, после снятия внешних возмущений. Его называют уравнением свободного движения системы:
 .
.
Частное решение неоднородного уравнения описывает поведение системы, определяемое свойствами системы и видом воздействия, и называется вынужденным.
Тогда:![]() .
.
Решением уравнения свободного движения является:
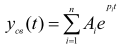 где
pi
– корни характеристического уравнения:
где
pi
– корни характеристического уравнения:

Ai – постоянные интегрирования, определяемые из начальных условий.
Операторный метод решения уравнений динамики предусматривает:
- приведение дифуравнений к операторной форме, применяя преобразование Лапласа с учетом заданных начальных условий;
- решение полученного алгебраического уравнения относительно искомой величины, записанной в операторной форме, используя в случае необходимости свойства преобразования;
- нахождение решения исходного уравнения динамики в обычной форме, применяя операцию обратного преобразования Лапласа.
Прямым преобразованием Лапласа функции f(t) действительного переменного t называется функция F(p) комплексного аргумента p = α + iω определяемая по формуле:
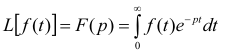
где L – символ операции прямого преобразования Лапласа.
Функцию f(t), называют оригиналом, а функцию F(p),– изображением.
Уравнение динамики системы в операторной форме всегда проще исходного дифференциального уравнения. При этом оно учитывает начальные условия и отражает физическую картину переходного процесса в системе.
Для отыскания оригинала по соответствующему изображению F(p) необходимо провести операцию обратного преобразования Лапласа, которая обозначается символом L-1:
Вычисление интеграла затруднительно и поэтому решения для распространенных случаев приводятся в таблице.
Если изображения нет в таблице, то его необходимо привести к удобной для решения форме. Часто изображение F(p) можно выразить в виде дробно-рациональной функции от р:
 .
.
если один из корней знаменателя равен 0, то оригинал может быть найден по формуле:
 ,
где
рi
– ненулевые корни знаменателя.
,
где
рi
– ненулевые корни знаменателя.
Выраженное в операторной форме уравнение динамики позволяет найти передаточную функцию системы:
 .
.
где Y(p) и X(p) – изображения по Лапласу выходной и входной величин при нулевых начальных условиях соответственно.
С помощью передаточных функций можно упростить описание динамики как АСР в целом, так и их элементов.
Передаточная функция АСР состоящая из n параллельно соединенных звеньев равна сумме передаточных функций отдельных ее звеньев.