

37. Измерение уровня сыпучих материалов
Измерение уровня сыпучих материалов имеет ряд особенностей:
- свободная поверхность не плоская и не параллельная плоскости земли,
- относительная подвижность частиц материала ограничена и поэтому могут образовываться конусы, полости,
- нельзя использовать приборы, основанные на законе Паскаля.
Поэтому для измерения уровня сыпучих материалов используют:
- Весовой метод,
- Ультразвуковой,
- Резонансный (струна).
Весовые уровнемеры сыпучего материала применяют в случаях, когда подвеска бункера не вызывает конструктивных осложнений. Весовой метод основан на взвешивании аппарата. При этом для обеспечения линейности статической характеристики сечение аппарата должно быть одинаковым по высоте. В качестве преобразователей в этом случае можно использовать различные весовые устройства. Так, в качестве преобразователя предельного уровня, если бункер покоится на опорных пружинах, можно применять конечные выключатели. При нагружении бункера происходят сжатие опорных пружин и линейное перемещение бункера по вертикали, что обеспечивает срабатывание конечных выключателей при наполнении и опорожнении бункера. В качестве преобразователей в весовых уровнемерах можно использовать динамометрические датчики и тензометры. В первом случае измеряют давление, передаваемое на опору бункера. Это давление является функцией степени наполнения бункера материалом. Во втором случае измеряют сопротивление проводника, пропорциональное уровню материала в бункере.
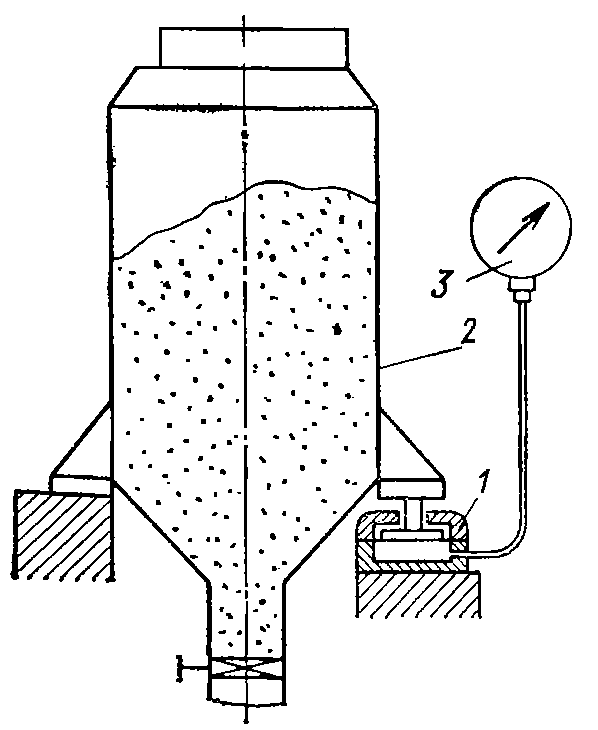
Рис. Весовой уровнемер с динамометрическим датчиком
Акустические уровнемеры сыпучих сред по принципу действия и устройству аналогичны акустическим уровнемерам жидких сред, но имеют большую мощность. Классы точности 1,0; 1,5. Минимальный диапазон измерений 0 – 2,5 м, максимальный 0 – 30 м. Контролируемая среда – гранулы диаметром 2 – 200 мм.
В резонансных уровнемерах резонансные колебания возбуждаются в отрезках длинной электрической линии. Этот отрезок длинной линии — первичный преобразователь — либо выполняется в виде отдельного конструктивного элемента, помещенного в резервуар, либо его роль могут выполнять конструктивные элементы технологической установки.
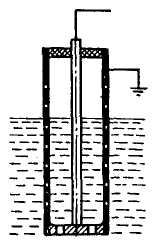
Рис. Схема преобразователя резонансного уровнемера
Обычно первичный преобразователь представляет собой тонкостенную металлическую трубу с боковыми отверстиями и соосно расположенным в ней металлическим стержнем. Применение резонансных уровнемеров основывается на шунтировании элементов преобразователя, т.е. уровень эквивалентен подвижной перемычке между трубой и стержнем преобразователя. При изменении уровня изменяется длина линии, что ведет к изменению резонансной частоты преобразователя. Например, при заполнении преобразователя уменьшается его длина и увеличивается резонансная частота. Эта зависимость является нелинейной.
34 Средства измерения перемещений и скорости
В качестве измерительных преобразователей перемещений используют устройства, характеристики которых изменяются при изменении относительного положения элементов. В зависимости от вида статической характеристики различают дискретные и непрерывные преобразователи.
Дискретные преобразователи имеют релейную статическую характеристику.При достижении измеряемой величиной значения Хср выходная величина скачкообразно изменяется от 0 до максимального значения Ymax. При дальнейшем увеличении входной величины (перемещения) выходная величина не изменяется. При уменьшении входной величины выходная уменьшается до 0 при другом значении Хот, которое всегда меньше Хср. Дискретные преобразователи характеризуются коэффициентом возврата К=Хот /Хср <1.Они могут быть контактными и бесконтактными.
Контактные представляют собой механический выключатель, замыкающий или размыкающий электрическую цепь.
Достоинства
простота конструкции и низкая стоимость, питание от постоянного и переменного тока.
Недостатки:
невысокая надежность, искрение при срабатывании, наличие непосредственного контакта с объектом, невысокая точность и значительный гистерезис.
Применяются как сигнализаторы максимальных перемещений, концевые выключатели.
Бесконтактные – оптические, емкостные, индуктивные.
Достоинства: нет контакта с объектом, малые габариты, высокие надежность и точность, К≈1.
Недостатки: сложность конструкции и более высокая стоимость, малые коммутируемые токи.
Непрерывные преобразователи. В них выходная величина изменяется непрерывно при изменении входной величины. Статическая характеристика может быть линейной или нелинейной. По принципу действия различают резистивные, емкостные, индукционные.
Принцип действия резистивных преобразователей основан на зависимости электрического сопротивления ЧЭ от положения подвижного элемента (контакта). ЧЭ представляет собой каркас, на который намотана проволока. В электрическую цепь ЧЭ чаще всего включаются как делитель напряжения.
Статическая характеристика преобразователя имеет вид:
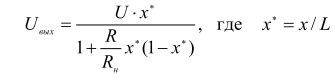
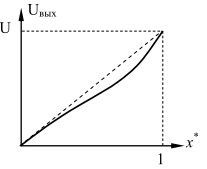
Степень нелинейности статической характеристики определяется соотношением сопротивлений датчика и нагрузки. Дляобеспечения линейности уменьшают сопротивление датчика (но это приводит к увеличению его потребляемой мощности) или используют каркас специального профиля.
Достоинства:
простота конструкции и низкая стоимость, некритичность к выбору питающего напряжения и мощный выходной сигнал, возможность получения статической характеристики любого вида путем изменения профиля каркаса.
Недостатки:
наличие подвижного контакта, что приводит к искрению, а также изменению характеристики вследствие истирания, наличие дополнительного переходного сопротивления.
Индуктивные преобразователи. Принцип действия основан на зависимости индуктивностиЧЭ от геометрических характеристик (воздушного зазора, расстояния между витками) или свойств магнитопровода.
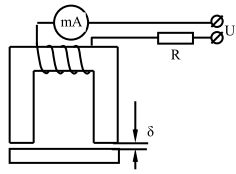
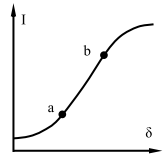
При подключении датчика к источнику переменного тока в цепи протекает ток. Магнитное сопротивление будет резко возрастать с увеличением зазора δ, индуктивность – уменьшаться, а ток в цепи – увеличиваться.Статическая характеристика нелинейна и используется участок, который можно считать линейным.Чувствительность датчика зависит от частоты питающего напряжения. Используются для контроля толщины немагнитных покрытий.
Емкостные преобразователи.
Принцип действия основан на изменении электрической емкости конденсатора при изменении положения его обкладок.

В качестве входных переменных используются расстояние между пластинами d и площадь перекрытия S. Статическая характеристика зависит от изменяемого параметра.
Преимущества – малые габариты и высокое быстродействие. Недостаток – сложность конструкции.
Измерение скорости вращения.
В качестве единицы измерений используют понятие частота вращения, т.е. количество полных оборотов в секунду (минуту): f=n/t. Угловая скорость и частота вращения связаны соотношениемω =2·π·f. В качестве средства изменения частоты вращения устройств или их частей применяются тахометры. По принципу действия делят на: механические, электрические, оптические. Механические тахометры подразделяются на центробежные и на вихревых токах.
В центробежных вращающийся маятник отклоняется под действием центробежной силы и через рычажную передачу приводит в движение стрелочный механизм.
Преимущества. Простота конструкции и невысокая цена, удобство использования, возможность непрерывного контроля, широкий диапазон измерений (до 10 000 об/мин). Показания не зависят от направления вращения.
Недостатки. Измеряют частоту не от нуля, а от некоторого значения.
Диапазон измерений - 1:3 – 1:10. Влияют на объект измерений из-за контакта с ним. Погрешность более 1%.
Тахометр на вихревых токах имеет вращающийся постоянный магнит, поле которого возбуждает вихревые токи в алюминиевом диске. При этом возникает вращающий момент, пропорциональный частоте вращения. Под действием этого момента перемещается стрелка до тех пор, пока не уравновесится противодействующим моментом, который создается пружиной.
Преимущества – измеряют частоту вращения от нуля.
Недостатки – максимальная измеряемая частота до 5 000 от/мин, погрешность – до 3%.
Электрические аналоговые. Представляют собой микромашины постоянного или переменного тока. Выходной сигнал – электрический. В одних частоте вращения ротора пропорциональна амплитуда, в других – частота выходного сигнала. Недостаток – контакт с объектом измерений. Погрешность более 1%.
Электрические дискретные. Чаще используются тахометры с индуктивным съемом сигнала. На вращающемся валу устанавливается постоянный магнит, который при перемещении вблизи катушки, наводит в ней э.д.с. Преимущество - отсутствие контакта с объектом. Недостаток – амплитуда сигнала зависит от частоты вращения.
Оптические. Наиболее распространены стробоскопы, принцип действия которых основан на сравнении частоты вращения с известной частотой вспышек источника света. Преимущества – отсутствие контакта с объектом, широкий диапазон измерений и малая погрешность. Недостаток – возможность ошибки при кратных частотах.
Тахометры выпускают как совмещенные с двигателями, так и отдельно.