

24. Измерительные цепи в виде неравновесных мостов. Функция преобразования мостовой неравновесной цепи.
О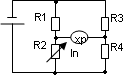 сновная
задача, которую решают неравновесные
мостовые цепи, состоит в исходной
компенсации начального значения
выходного сигнала. Это означает, что
при равенстве нулю измеряемой величины
Х, такая цепь обеспечивает = 0 выходного
сигнала и, т.о., устраняет погрешность
смещения нуля.Для выполнения основной
задачи к делителю R1
R2,
содержащему преобразователь R2,
добавляют ещё один делитель R3
R4,
а между сред- ними токами включают
указатель. При отклон измеряемой величины
Х от нуля новое значение R2'
= R2
+ ∆R.
В результате мост будет вы-
сновная
задача, которую решают неравновесные
мостовые цепи, состоит в исходной
компенсации начального значения
выходного сигнала. Это означает, что
при равенстве нулю измеряемой величины
Х, такая цепь обеспечивает = 0 выходного
сигнала и, т.о., устраняет погрешность
смещения нуля.Для выполнения основной
задачи к делителю R1
R2,
содержащему преобразователь R2,
добавляют ещё один делитель R3
R4,
а между сред- ними токами включают
указатель. При отклон измеряемой величины
Х от нуля новое значение R2'
= R2
+ ∆R.
В результате мост будет вы-
ходить из состояния равновесия. При этом появится ток нагрузки и напряжение на нагр.Функция преобразования мостовой неравновесной цепи представляет собой зависимость напряжения на нагрузке от изменения сопротивления любого типа на ∆R.
Выглядит она аналогично функциям преобр. цепей в виде делителей. Отличием явл. то, что в случае изм. цепи в виде делителя выходное напряжение является падением напряж. на R2. Выходное напряжение моста Vн = V3-V1(R1)(при изменении R1) или
Vн = -V4+V2(R2) (при изменении R2)
2 5. Неравновесный мост с дифференциальным преобразователем.
Функция преобразования неравнов моста с дп линейна при Rн =∞ Если Rн ≠∞, функция преобразования для моста с дп, в котором при равновесии сопротивления всех плеч будут равны R0/2, будет определяться следующими выр-ми:
1
![]() )Задаётся
напряжение питания моста
)Задаётся
напряжение питания моста
![]() ℰ=∆
R/
R
2)
задаётся ток
ℰ=∆
R/
R
2)
задаётся ток
Если преобразователь включён в плечи R1 и R3 в режиме заданного напряжения питания, выходное напряжение моста и ф-я преобразования будет нелинейна при любых сопротивлениях нагрузки. В режиме заданного тока ф-я преобразования будет линейна при любых сопротивлениях нагрузки.
![]()
26. Чувствительность измерительных цепей в виде неравновесных мостов. Разновидности неравновесных мостов.
Ч![]()
![]() увствительность
по напряжению мостовой цепи в точке
равновесия можно считать постоянной.
Неравновесные мосты чаще всего
используются в режиме малых ℰ.
В этом режиме неравновесные мосты имеют
наименьшую погрешность линейности и
практически постоянную чувствительность.
Если в рассматриваемом сопротивл. плечи
получают +ℰ1,
-ℰ2,
+ℰ3,
-ℰ4(малые
значения), то выходное напряжение моста
увствительность
по напряжению мостовой цепи в точке
равновесия можно считать постоянной.
Неравновесные мосты чаще всего
используются в режиме малых ℰ.
В этом режиме неравновесные мосты имеют
наименьшую погрешность линейности и
практически постоянную чувствительность.
Если в рассматриваемом сопротивл. плечи
получают +ℰ1,
-ℰ2,
+ℰ3,
-ℰ4(малые
значения), то выходное напряжение моста
где к = R1/ R2 = R3/ R4
п![]() ри
к = 1 получим равноплечий мост
ри
к = 1 получим равноплечий мост
П![]() ри
использовании дифференциального
преобразователя, т.е. при одновременном
изменении 2-х плеч моста R1+∆
R,
R2
- ∆ R,
Rн
=∞
ри
использовании дифференциального
преобразователя, т.е. при одновременном
изменении 2-х плеч моста R1+∆
R,
R2
- ∆ R,
Rн
=∞
Если R2= R1, ∆ R/ R1 = ∆ R/ R2 = ℰ , то .
Записанное выр-е показывает значение коэффициента чувствительности
![]()
Полученное значение коэффициента чувствительности для Rн =∞ остаётся справедливым и для случая изменения сопротивлений двух других плеч на величину ℰ. При изменении сопротивления лишь одного из плеч моста, коэффициент будет в 2 раза меньше. При изменении всех 4-х плеч коэффиц. =1. Если изменять сопрот. 2-х смежных плеч, то мост не выходит из равновесия при условии ℰ4= ℰ2, ℰ3= ℰ1. В этом сулучае чувств.=0.
Разновидности неравновесных мостов:1)Равноплечий.Выходное сопротивление R, R1= R2= R3= R4= R.а) Максимальная мощность сигнала нагрузки достигается при согласовании сопр. нагрузки с выодным сопр. моста. Rн = R.
б) Чувствительность моста увеличивается с увеличением числа рабочих плеч, увеличив. и напряжение питания. 2) Последовательно-симметричный мост.
Т![]() акой
мост имеет одну ветвь, составленную из
2-х последовательно соединённых
преобразователей с R1=
R2,
и 2-х параллельно соед. резисторов R3
и R3.
акой
мост имеет одну ветвь, составленную из
2-х последовательно соединённых
преобразователей с R1=
R2,
и 2-х параллельно соед. резисторов R3
и R3.
С![]() опротивление
Rн
зависит не только от R1
и R2,
но и от сопротивлений плеч балластного
делителя.3)
Параллельно-симметричный мост.отличается
тем, что рабочие измерительные
преобразователи включены в различные
ветви моста. Выполнить эту рекомендацию
не получится, т.к. для поддержания в изм
цепи преобр R1и
R3
рабочего тока I
потребуеться источник ЭдС= ∞, поэтому
R2
и R4
↑ лишь настолько , наск это позвол напр
ист . Т.о. для достижения максимальной
чувствительности, постоянные сопротивления
плеч R2
R4
должны быть в 2 раза меньше чем R1=
R3.
опротивление
Rн
зависит не только от R1
и R2,
но и от сопротивлений плеч балластного
делителя.3)
Параллельно-симметричный мост.отличается
тем, что рабочие измерительные
преобразователи включены в различные
ветви моста. Выполнить эту рекомендацию
не получится, т.к. для поддержания в изм
цепи преобр R1и
R3
рабочего тока I
потребуеться источник ЭдС= ∞, поэтому
R2
и R4
↑ лишь настолько , наск это позвол напр
ист . Т.о. для достижения максимальной
чувствительности, постоянные сопротивления
плеч R2
R4
должны быть в 2 раза меньше чем R1=
R3.