

2. Трансформаторные (взаимоиндуктивные) преобразователи
В основу этих преобразователей положено явление взаимоиндукции между первичной и вторичной обмотками. Схема дифференциального трансформаторного ПИП показана на рисунке
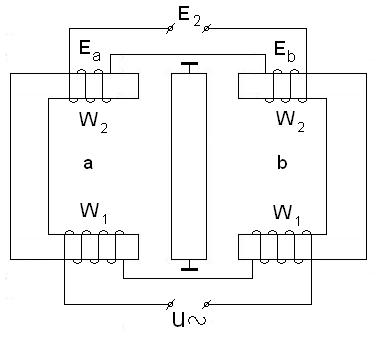

Если сравнить схемы индуктивного и взаимоиндуктивного ПИП то можно отметить, что конструкции их магнитной цепи одинаково, а отличаются они только числом обмоток.
П
 ри
центральном расположении сердечника
ЭДС вторичных обмоток равны между собой
и суммарная выходная ЭДС Е2=0,
так как обмотки включены встречно. При
совмещении сердечника ЭДС Е2
определяется по формуле
ри
центральном расположении сердечника
ЭДС вторичных обмоток равны между собой
и суммарная выходная ЭДС Е2=0,
так как обмотки включены встречно. При
совмещении сердечника ЭДС Е2
определяется по формуле
![]()
Пологая,
что
![]() ,
а
,
а
![]() ,
можно упросить это выражение:
,
можно упросить это выражение:
![]()
3. Магнитоупругие преобразователи

Принцип действия основан на изменении магнитной проницаемости ферромагнитных тел в зависимости от возникновения в них механических напряжений (магнитоупругий эффект), обусловленных воздействием механических сил.
Т ипы
магнитоупругих ПИП можно разбить на
две основные группы. К первой группе
относятся преобразователи, в которых
используются изменения магнитной
проницаемости чувствительного элемента
в одном направлении. Магнитный поток в
них направлен вдоль линии действия
прилагаемого усилия. В преобразователях
этой группы под действием измеряемой
силы изменяется индуктивность обмотки
(рис.1) или индуктивность между обмотками
(рис.2).
ипы
магнитоупругих ПИП можно разбить на
две основные группы. К первой группе
относятся преобразователи, в которых
используются изменения магнитной
проницаемости чувствительного элемента
в одном направлении. Магнитный поток в
них направлен вдоль линии действия
прилагаемого усилия. В преобразователях
этой группы под действием измеряемой
силы изменяется индуктивность обмотки
(рис.1) или индуктивность между обмотками
(рис.2).
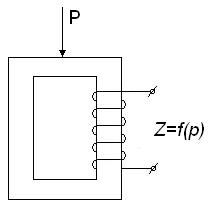

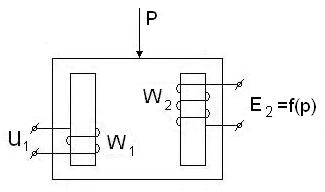
Рисунок 1 Рисунок 2

В первом случае реализуется цепь
преобразований
первом случае реализуется цепь
преобразований
![]() ,
во втором -
,
во втором -
![]() .
.
Ко второй группе относятся преобразователи, в которых используется изменение магнитной проницаемости одновременно в двух взаимно перпендикулярных направлениях.
В этих преобразователях магнитный поток направлен под углом 45 к линии действия измеряемого усилия. В ненагруженном состоянии преобразователя силовые линии первичной обмотки располагаются симметрично и не сцепляются со вторичной обмоткой, в результате этого ЭДС вторичной обмотки равна нулю. После приложения усилия вследствие изменения магнитной проницаемости магнитные силовые линии вытягиваются в направлении большей проницаемости и, сцепляясь со вторичной обмоткой, индуктируют в ней ЭДС, пропорциональную приложенному усилию.
4 . Индукционные преобразователи
И
 ндукционные
преобразователи основаны на использовании
явления электромагнитной индукции.
Согласно закону электромагнитной
индукции, ЭДС в контуре определяется
формулой
ндукционные
преобразователи основаны на использовании
явления электромагнитной индукции.
Согласно закону электромагнитной
индукции, ЭДС в контуре определяется
формулой
![]() ,
где
,
где
![]() - потокосцепление с контуром. Таким
образом, выходной величиной индукционного
ПИП является ЭДС, а входной – скорость
изменения потокосцепления.
- потокосцепление с контуром. Таким
образом, выходной величиной индукционного
ПИП является ЭДС, а входной – скорость
изменения потокосцепления.
В
 общем случае индукционный преобразователь
представляет собой катушку с сердечником
или без сердечника, в которой наводится
ЭДС. При наличии сердечника ЭДС в катушке
может индуктироваться как в результате
изменения внешнего магнитного поля,
так и в результате изменения во времени
обобщенного параметра Y.
общем случае индукционный преобразователь
представляет собой катушку с сердечником
или без сердечника, в которой наводится
ЭДС. При наличии сердечника ЭДС в катушке
может индуктироваться как в результате
изменения внешнего магнитного поля,
так и в результате изменения во времени
обобщенного параметра Y.
Обобщенный
параметр преобразователя
![]() является функцией четырех частных
параметров ,
S,
,
N,
где
является функцией четырех частных
параметров ,
S,
,
N,
где
- угол между магнитной осью преобразователя и вектором магнитной индукции;
S – площадь поперечного сечения катушки;
- магнитная проницаемость среды в единицах 0;
N – коэффициент размагничивания сердечника.
Д ля
катушек без сердечников уравнения
преобразования существенно упрощаются
и для основных видов преобразователей
сводятся к следующим:
ля
катушек без сердечников уравнения
преобразования существенно упрощаются
и для основных видов преобразователей
сводятся к следующим:
д

 ля
неподвижной катушки в переменном
магнитном поле
ля
неподвижной катушки в переменном
магнитном поле
 ;
;д
 ля
катушки, вращающейся с частотой
в постоянном магнитном поле с индукцией
В0
ля
катушки, вращающейся с частотой
в постоянном магнитном поле с индукцией
В0
 ;
;д
 ля
отрезка длиной l,
движущегося в однородном магнитном
поле со скоростью V
так,
что направления векторов
ля
отрезка длиной l,
движущегося в однородном магнитном
поле со скоростью V
так,
что направления векторов
 взаимно перпендикулярны,
взаимно перпендикулярны,
 .
.
Индукционные преобразователи для измерения параметров магнитных полей, частоты вращения, параметров вибрации и сейсмических колебаний, расхода жидких веществ.