

4.7 INetVu™ Меню (config Mode)
Следующий раздел будет посвящен описанию всех параметров и функций, доступных только в режиме CONFIG mode. Здесь будут объясняться только новые возможности.
Смотрите главу iNetVu™ Меню (USER Mode) для более детального описания параметров и функций которые можно найти также в USER mode.
4.7.1 Конфигурация (Configuration)
При работе в CONFIG mode, параметры, которые были не доступны, теперь доступны и могут быть изменены в Конфигурационном меню.

4.7.2 Расширенное Конфигурационное меню

Compass Reading Elevation
Угол на который надо поднять антенну, при котором гарантируется уровень компаса и точность считывания данных компаса.

Advanced Search EL Gap
Параметр, используемый для определения приращения регулировки, требующийся для более точного поиска спутника. Уменьшение этой величины увеличит точность поискового окна, но увеличит время поиска.
Data File Max Size
Максимум размера Log файла данных.
Log файла данных имеет имя iNetVuData5000.txt
Log файла данных Backup имеет имя iNetVuData5000.bak
Unattended Operation
Эта опция рекомендуется для не обслуживаемых удаленных сайтов, которые имеют включенные опции Movement Protection и Motion Protection.
Auto Find Satellite
Позволяет автоматически запустить команду Find Satellite когда запускается программа iNetVu™.
Re-Configure System
Позволяет пользователю переконфигурировать системные установки после перезапуска программы iNetVu™
Motion Protection
Антенна будет автоматически складываться, если на неё будут воздействовать чрезмерные нагрузки, такие как сильная тряска при сильном ветре.
Movement Protection
Мобильная платформа iNetVu™ сложится автоматически, если антенна обнаружит движение более 5 км/ч
HTTP Server Enabled
Программа iNetVu™ автоматически будет обращаться к HTTP серверу, для того чтобы пользователю был доступен Web-интерфейс.
4.7.3 Обслуживание
Изменение параметров
После того как параметры изменены в Maintenance Menu, вы должны нажать Send <Parameter Modified > для того, чтобы изменения были сохранены и записаны.
Пример:
Изменен Азимут: нажмите Send AZ
Измене Угол места: нажмите Send EL
Изменения обычно хранятся в системном регистре ПК, следующим за EPROM контроллера iNetVu™. Вам нужно будет сохранить сделанные изменения в EPROM контроллера, и это рекомендуется, так как вы можете потерять все ваши изменения после выключения питания контроллера.

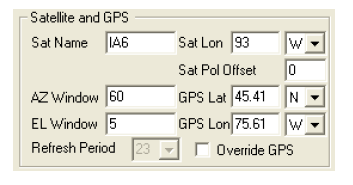
Satellite and GPS Parameters
Спутниковые и GPS Параметры
Sat Pol Offset
Указывает полярность передачи и может быть подстроена в диапазоне 0° - 90° 0- Вертикальная 90- Горизонтальная.
Elevation Parameters
Offset
Ч


Азимутальные параметры

Азимутальный угол основывается на 2-х величинах:
AZ Pot (Потенциометр) фактор
AZ Pot Ноль
AZ Pot фактор – это A/D (Analog/Digital) значение от потенциометра, которое позволяет программе iNetVu™ преобразовывать A/D значение потенциометра в эквивалентный угол. AZ Pot фактор может быть изменен приблизительно +15% от величины, установленной по умолчанию.
AZ Pot Ноль – это A/D значение от потенциометра, которое физически определяет где программа iNetVu™ помещает азимутальный угол, равный 0. AZ Pot Ноль может изменяться приблизительно +15% от величины, установленной по умолчанию.
AZ Pot Ноль и AZ Pot фактор вычисляются в процессе калибровки Азимута.

Поляризационные параметры


![]()
Demo / Test
Открывает системный тест и экран Демо меню
Opens System Test and Demo menu screen.
S
![]()
Посылает связанные параметры в память контроллера EPROM.
Система запросит пользователя, сохранять ли эти параметры в EPROM.
Эти значения сохраняется только в EPROM и будут потеряны, если контроллер сбросить.
W
![]()
Посылает и записывает все параметры в EPROM контроллера
S
![]()
Посылает все параметры в память контроллера. Система известит и запросит пользователя, сохранять ли эти параметры в EPROM.
![]()
Read All
Считывает все параметры из памяти EPROM контроллера и устанавливает эти значения в программу iNetVu™.
![]()
Save Registry
Посылает все параметры в локальный регистр.
R
![]()
Считывает все параметры из локального регистра и устанавливает их в программу iNetVu™.
A
![]()
Открывает Advanced Maintenance меню
![]()
Calibrate PL
Выполняет процесс автоматической калибровки поляризации.
Антенна будет поворачиваться против часовой стрелки до физического предела и временно запишет A/D значение от потенциометра.
Антенна будет поворачиваться по часовой стрелке до физического предела и временно запишет A/D значение от потенциометра.
На основании A/D от двух физических пределов, и диапазона движения мобильной платформы вычисляется PL Pot Factor
Антенна центруется и пытается определить положения срабатывания концевых выключателей.
После определения, на каком значении угла нужно отключать ST Switch, вычисляется нулевое положение поляризации и вычисляется PL Pot Zero и устанавливается в zeroed A/D value.
Вас запросят ввести ID номер платформы перед окончанием процесса калибровки.
![]()
Calibrate AZ
Выполняет процесс автоматической калибровки Азимута.
Антенна будет поворачиваться против часовой стрелки до физического предела и временно запишет A/D значение от потенциометра.
Антенна будет поворачиваться по часовой стрелке до физического предела и временно запишет A/D значение от потенциометра.
На основании A/D от двух физических пределов, и диапазона движения мобильной платформы вычисляется AZ Pot Factor
Антенна центруется и пытается определить положения срабатывания концевых выключателей.
После определения, на каком значении угла нужно отключать ST Switch, вычисляется нулевое положение поляризации и вычисляется AZ Pot Zero и устанавливается в zeroed A/D value.
Вас запросят ввести ID номер платформы перед окончанием процесса калибровки.
C
![]()
Программа iNetVu™ будет двигать мобильную платформу по угломестной оси в целях калибровки существующих угломестных пределов. Обычно эта функция никогда не используется и не рекомендуется пользователям без наблюдения и технической поддержки сотрудников C-COM.
C
![]()
Проверка курсового направления компаса и проверка точности, вращением антенны с 90° интервалами и сравнения с прочитанными данными компаса при вращении антенны.
Антенна будет центрироваться, и двигаться по углу места для чтения компаса, затем прочитает курсовое направление компаса.
Антенна будет поворачиваться на 90° с каждой следующей позицией и считывает для каждой: 0°, 90°, 180°,-90°, 0°.
Программа iNetVu™ будет сравнивать направление, прочитанное компасом в каждой позиции, и отрегулирует, если оно отличаются немного от 90 °.
Проверка компаса будет отображена сообщением относительно точности компаса.
![]()
Calibrate CP
Автоматическая калибровка компаса.
Убедитесь, что поблизости нет металлических предметов, которые могут влиять на компас, и что платформа выставлена без отклонений.
Ориентируете мобильную платформу как изображено на рис. Это рекомендовано тем пользователям, которые пользуются внешним компасом с точностью, которую он обеспечивает.

Антенна будет теперь вращаться с 90 ° интервалами, и пытаться калибровать компас.
После появится сообщение об успешном или нет завершении проведения теста.
4.7.4. Демонстрация системы и тестирование
Используется для системных тестов, устранения неполадок и для демонстрации работы iNetVu™ мобильной системы.

Start Angles
Начальный угол для test/demo
End/Demo Angles
Конечный угол для test/demo
Speed
Скорость двигателей во время test/demo (1-нижняя, 9-верхняя)
Loop the Test/Demo
Непрерывная демонстрация test/demo
Loop Interval
Время между циклами test/demo.