

Чувствительные элементы.
Чувствительные элементы воспринимают отклонение контролируемого параметра и передают его непосредственно или с помощью кинематических преобразовательных элементов электроконтактным элементом измерительного преобразователя. Чувствительные элементы ЭКИП это как правило жесткая сборная конструкция, включающая в себя целый ряд в принципе самостоятельных деталей: измерительный наконечник, измерительный стержень, подвеска измерительного стержня или его направляющие, пружина создающая измерительное усилие, ориентирующее устройство или ориентирующая микропара, а так же детали препятствующие повороту измерительного стержня вокруг своей оси в процессе работы измерительного преобразователя.
Измерительный наконечник закрепляется на резьбе, на конце измерительного стержня. Контактная часть наконечника в соответствии с ГОСТ 99 должна выполняться из твердого сплава с радиусом сферы 5 мм. Иногда контактную часть наконечника выполняют из корунда. Измерительный стержень обычно изготавливают из Стали 9Х18, закаливают до твердости HRC 57-60 единиц и устанавливают в направляющих скольжения, представляющих собой втулки из Бронзы ОЦС 6-6-3. В таких направляющих измерительный стержень может работать без смазки в течении нескольких миллионов циклов измерений. Необходимо отметить, что направляющие измерительного стержня не рекомендуют смазывать во избежание возможного загрязнения электрических контактов преобразователя, а так же попадания частичек пыли в зазоры направляющих, что приводит к преждевременному износу их.
Установка измерительного стержня в направляющих скольжения обеспечивает наиболее простое и технологичное решение вопроса. Недостатком их является перекос измерительного стержня при частичном износе направляющих втулок, который вносит погрешности в результаты контроля, а так же возможность заедания измерительного стержня в направляющих в результате старения корпуса и накапливания пыли и грязи в имеющихся зазорах. Для уменьшения указанных погрешностей измерительный стрежень тщательно притирают к направляющим и разносят направляющие втулки на возможно большее расстояние друг от друга, а при использовании одной втулки удлиняют ее до размера, равного 4-5 диаметрам измерительного стрежня. Поворот измерительного стержня вокруг своей оси в процессе работы измерительного преобразователя предотвращается чаще всего установкой на измерительном стержне кронштейна, имеющего продольный паз. В пазу располагается штифт, запрессованный в корпус. Такой механизм имеется в преобразователях моделей 228, 229, 230 и им подобных. Иногда поворот стержня предотвращается штифтом, ввернуты в измерительный стержень. Свободный конец штифта скользит в пазу колодки прикрепленный к корпусу преобразователя (преобразователь модели 233). Детали, предотвращающие поворот измерительного стержня вокруг своей оси одновременно служат ограничителями его крайнего нижнего положения. В некоторых конструкциях измерительных преобразователей измерительный стержень подвешивается на плоскопружинном параллелограмме с прокладками.
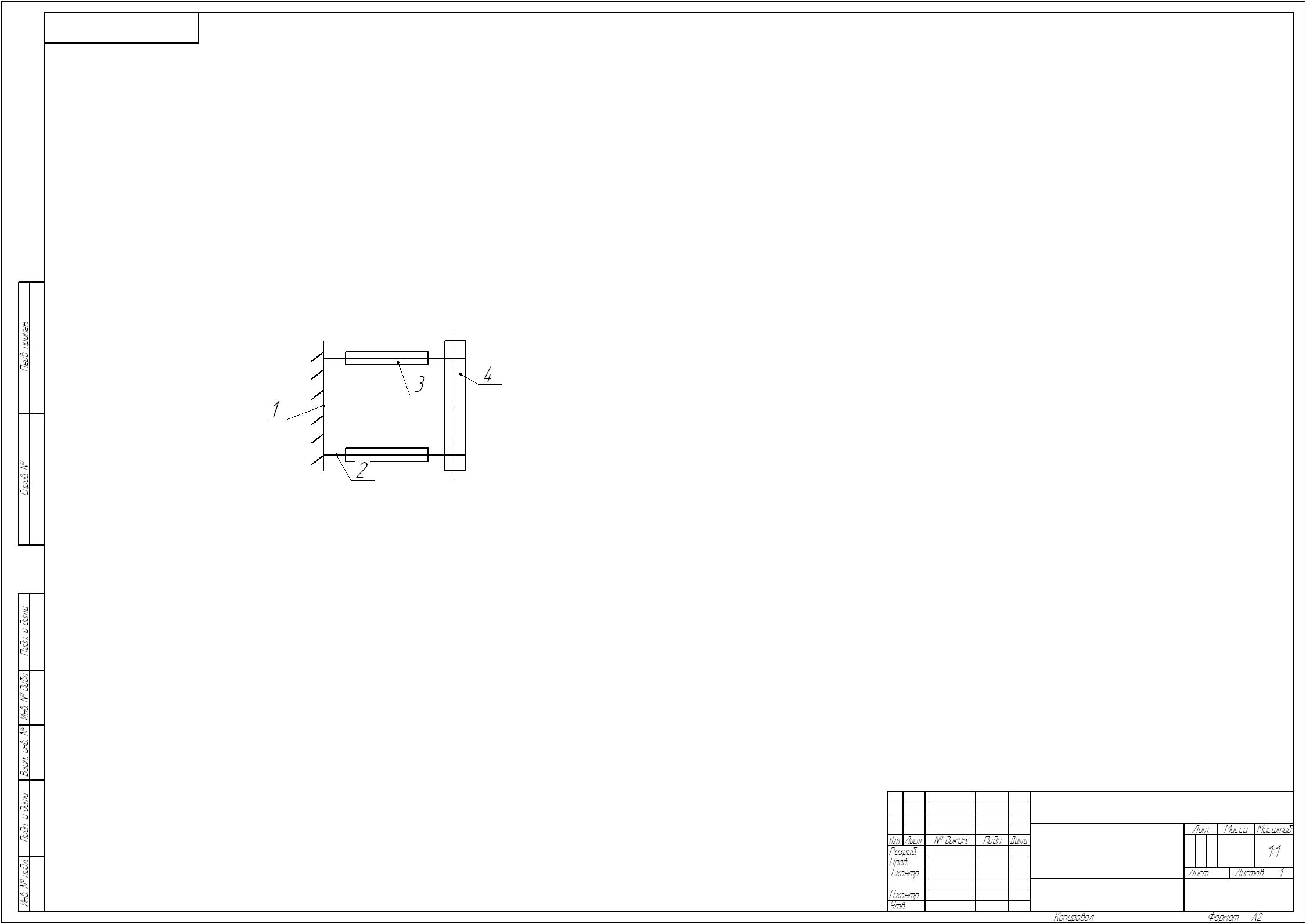
Рис. Подвес на плоскопружинном параллелограмме с прокладками.
Корпус
пружины
накладки
измерительный стержень
Накладки нужны для повышения жесткости измерительной системы от боковых нагрузок.
Достоинства:
отсутствие внешнего трения
устраняются зазоры
повышается точность работы
обеспечивается простая и надежная конструкция, т.к. параллелограммы не содержат деталей, размеры которых ограничивается особо жесткими допусками.
Недостатки:
большие габаритные размеры
уменьшение свободного хода измерительного стержня
В конструкциях измерительных преобразователей, имеющих возможность установки шкальных устройств и обеспечивающих возможность настройки по образцовой детали и показывающему прибору. Как правило имеется устройств, обеспечивающее малые перемещения измерительного стержня.
Обычно это устройство представляет собой гайку, навинчивающуюся на втулку с наружной резьбой. Внутри втулки происходит измерительный стрежень и гайка своим буртиком упирается в его торец.
Так устроена микропара в преобразователях моделей 228, 229, 230, 231 в измерительных преобразователях моделей 248 измерительного стержня обеспечиваются с помощью ориентирующего устройства, состоящего с помощью рычага и микровинта.