

9.Динамический фактор и динамические характеристики
Д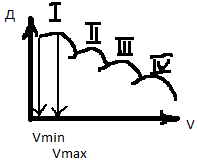 инамический
фактор-
разница между силой тяги в ведущих
колесах и сопротивлением воздушной
среды, приходящейся на единицу массы
авто.
инамический
фактор-
разница между силой тяги в ведущих
колесах и сопротивлением воздушной
среды, приходящейся на единицу массы
авто.
---динамическая х-стика автомобиля(чем больше скор, тем меньше Д)
Динамический фактор – равен удельной силе тяги, затрачиваемый на дорожн-е сопротивления качения и подъем.
+
+
+
<Ра;
 ;
;
 Gf+ Gi= Pa;
Pa-
Pw=G(f
+/- i)
Gf+ Gi= Pa;
Pa-
Pw=G(f
+/- i)
Д=(Pa- Pw)/G= f +/- i сопрот воздушн среды
Если ΣРа< Тсц
Дсц=(Pa- Тсц)/G= f +/- i
10.Особенность макс. Продольного уклона.
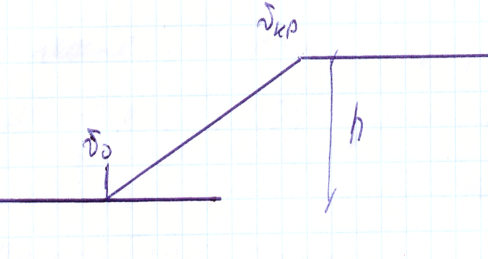
Продольный уклон – это отклонение проектной линии от горизонтали.
Макс. Продольный уклон рассчитывают по силе тяги и по сцеплению.
Предполог-ся, что ад должна обеспечивать движение авт с постоян расчетной скоростью(сила инерции=0)
Максимальный уклон Lmax=Д-f по тяге
Lmax=Дсц-f по сцеплению f- сопротивл качению
Короткие участки ад могут иметь большие уклоны, за счет учета сил инерции или уменьшения кинетич инергии
h=ig
lg;
 =G
ig
lg
=G
ig
lg
ig=
1a 1б,в,2 3 4 5
vp 140 120 100 80 60
i% 40 40 50 60 70
из ТКП 45
11 Торможение автомобиля
 -
это процесс принудительного снижения
Ѵ или остановки ТС
-
это процесс принудительного снижения
Ѵ или остановки ТС
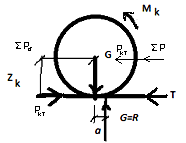
при торможении двигатель отсоеденяется от сцепления, тормозная сист на всех колесах создает тормозн момент Мкт и соотв ему пару сил Ркт
силы
инерции
 +
+
+Pi
; Ркт=Тсц=φG
+
+
+Pi
; Ркт=Тсц=φG
при торможении Pw≈0 Рf<<Pкт
сила тормож-я вызывает уменьшение скор и кинетич энерг авт.
 =
φG+/-
iG
=
φG+/-
iG
 энергия
, которая стремится к нулю
энергия
, которая стремится к нулю
 определяет
тормозной путь авт от
вкл тормозов, до полной остановки
определяет
тормозной путь авт от
вкл тормозов, до полной остановки
12. Требования к видимости на а.Д.
Видимостью на дороге наз. мин зона видимости пути в направлении движения за капотом а/м, с кот водитель воспринимает информацию в усл дор движения необходимую для безопасности управления ТС с расчетной Ѵ и иметь возможность своевременно принять меры для остановки перед препятствием.
Различают расчетное расстояние видимости:
- для остановки авт перед неподвижн препятствием
 -
расчетн скор движ-я
-
расчетн скор движ-я
 -
время реакц водител(2,6)
-
время реакц водител(2,6)
Кэ коэф, учитыв эффект действ тормозов1,3 для легковых
 -
коэф продольного сцепления
-
коэф продольного сцепления
i -продольн уклон
 зазор
безопасн между авт и препятств(5м)
зазор
безопасн между авт и препятств(5м)
-для обгона тихоходного автомобиля
S2 =(Vptp/1.8 +Vp2 φi Kэ/127(φ±i) + lз ; видим встречн автомоб
S3 = V12/ [1,8(V1 – V2)] + Kэ * V1(V1 + V2)/ (127 * φ1) +
+ [Kэ * V22/(254 * φ1) + lзб] * 2V1/(V1 – V2),
Видим при обгоне
где V1 и V2 – скорости движения легкового и грузового автомобилей
-боковая видимость
 ;
;
Vп скор бегущего пешехода(10км/ч)
Vр-расчетн скор
S1 расчетн расст видим
13. Расстояние видимости для остановки
Видимостью на дороге наз. мин зона видимости пути в направлении движения за капотом а/м, с кот водитель воспринимает информацию в усл дор движения необходимую для безопасности управления ТС с расчетной Ѵ и иметь возможность своевременно принять меры для остановки перед препятствием.
Различают расчетное расстояние видимости:
- для остановки авт перед неподвижн препятствием
- расчетн скор движ-я
- время реакц водител(2,6)
Кэ коэф, учитыв эффект действ тормозов1,3 для легковых
- коэф продольного сцепления
i -продольн уклон
зазор безопасн между авт и препятств(5м)