

27. Пьезоэлектрические преобразователи
Пьезоэлектрические преобразователи — это устройства, использующие пьезоэлектрический эффект в кристаллах, керамике или плёнках и преобразующие механическую энергию в электрическую и наоборот.
Исходя из физического принципа действия все пьезоэлекрические преобразователи делятся на три группы:
Преобразователи, использующие прямой пьезоэффект и применяемые в приборах для измерения параметров механических процессов, в том числе: силы, акустического и быстропеременного давления, линейных и угловых ускорений, а также вибрации, ударов.
Преобразователи, использующие обратный пьезоэффект и применяемые в качестве излучателей ультразвука в гидроакустике и дефектоскопии, преобразователях напряжения в перемещение (пьезодвигатели и пьезореле) для юстировки зеркал оптических приборов и исполнительных элементов систем автоматики.
Преобразователи параметрического типа, использующие одновременно прямой и обратный пьезоэффекты - пьезоэлектрические резонаторы, наиболее эффективно излучающие и принимающие энергию на фиксированной резонансной частоте. Пьезорезонаторы применяются в полосовых фильтрах, линиях задержки, преобразователях перемещения или присоединенной массы в частоту для датчиков уровня, плотности и др.
Достоинствами пьезоэлектрических преобразователей являются высокая линейность характеристик, широкие динамические и частотные диапазоны, простота конструкции и высокая надежность при эксплуатации.
Преобразователи, основанные на использовании прямого пьезоэффекта, называют преобразователями-генераторами; они имеют механический вход и электрический выход. Преобразователи, основанные на использовании обратного пьезоэффекта, называют преобразователями-двигателями; они имеют электрический вход и механические выходы. Известно множество пьезоэлектрических устройств, основанных на использовании как прямого, так и обратного эффектов. Прямой эффект используется, например, в микрофонах, звукоснимателях, датчиках механических сил, перемещений и ускорений, бытовых зажигалках для газа и др. Обратный эффект послужил основой для создания телефонов, громкоговорителей, ультразвуковых излучателей, реле, двигателей и т. п.
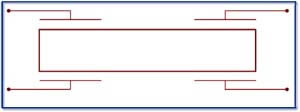
Известны и нашли практическое применение пьезоэлектрические преобразователи - пьезоэлектрические трансформаторы (сокращенно пьезотрансформаторы). Схематически устройство пьезотрансформатора изображено на рисунке, поясняющем, что он представляет собой пьезоэлектрический преобразователь в виде четырехполюсника, имеющего только электрические вход и выход.
28. Угольные и гидравлические датчики
Угольные датчики применяют в основном для измерения больших усилий и давлений. Обычно угольный датчик имеет вид столбика из графитовых дисков, на концах которого находятся контактные диски и упорные приспособления, воспринимающие измеряемые усилия. Сопротивление такого столбика электрическому току складывается из собственно сопротивления графитовых дисков и переходного контактного сопротивления поверхностей их соприкосновения. Из-за неровности поверхностей графитовых дисков их соприкосновение происходит не по плоскости, а по отдельным точкам. Если угольный датчик подвергнуть сжатию, то площадь соприкосновения графитовых дисков увеличивается и переходное контактное сопротивление уменьшается. Это свойство и используют в угольном датчике.
Существенными недостатками угольных датчиков являются нелинейность характеристики, нестабильность сопротивления и значительный (до 5%) гистерезис, т.е. различие между сопротивлением для одних и тех же величин усилий при сжатии и последующем снятии сжимающего усилия.
Область применения угольных датчиков ограничена измерением больших усилий и давлений, не требующих большой точности.
В гидравлической системе рабочей жидкостью чаще всего служит масло, поэтому выходной сигнал у гидравлических датчиков — это величина расхода или давления масла. Масло подается в гидролинию по трубам от насоса. Поэтому гидравлические датчики, получая на входе информацию в виде перемещения упора, превращают ее в выходной сигнал в виде включения или изменения направления потока масла. Такими датчиками являются направляющие гидравлические распределители, открывающие или перекрывающие канал, подводящий масло. При небольших его расходах используется самая простая конструкция датчиков. Цилиндр направляющего распределителя врезается в гидролинию. Плунжер распределителя может открыть канал, подводящий масло к рабочему цилиндру, или перекрыть его. На наружном конце плунжера имеются пружинка и ролик. Когда упор подходит к ролику и давит на него, сжимая пружинку, плунжер опускается и перекрывает канал. Масло перестает поступать в цепь управления, т. е. в рабочий цилиндр (исполнительное звено). Как только упор перестанет давить на ролик, плунжер под действием пружины возвратится в исходное положение и масло начнет поступать в цепь управления. Для изменения направления подачи масла используются системы с различными воздействиями на входе. Масло под давлением из трубы проходит через корпус гидрораспределителя, поступает в канал и в левую полость рабочего цилиндра. Из правой полости цилиндра масло через канал и правую полость гидрораспределителя поступает на слив в бак. Когда упор, закрепленный на движущейся части станка (столе), подойдет к рычагу и надавит на него, рычаг повернется на оси по часовой стрелке и переместит плунжер влево. При этом плунжер перекроет полость гидрораспределителя, соединяющую трубу с каналом, и откроет полость, соединяющую трубу с каналом. Масло под давлением по каналу начнет подаваться в правую полость цилиндра, а из левой полости масло поступает в канал и через гидрораспределитель — на слив. Во избежание гидравлических ударов масла при резко меняющихся направлениях движения предусматривается устройство, замедляющее скорость плунжера при подходе к крайним положениям. Между полостью А, трубопроводом и полостью Б, заполненных маслом, установлен дроссель. Чтобы сдвинуться влево, плунжер перегоняет масло из полости а в полость. Быстрому движению масла препятствует дроссель, отрегулированный на заданный режим. То же происходит при движении плунжера вправо. Фиксация положения рычага после его поворотов производится рычагом и пружиной.
29. Поляризационно-оптический метод исследования напряжений и деформаций
Поляризационно-оптический метод исследования напряжении, метод изучения напряжений в деталях машин и строительных конструкциях на прозрачных моделях. Основан на свойстве большинства прозрачных изотропных материалов (стекло, целлулоид, желатин, пластмассы — оптически чувствительные или пьезооптические материалы) становиться при деформации оптически анизотропными, т. е. на возникновении искусственного двойного лучепреломления (т. н. пьезооптического эффекта). Главные значения тензора диэлектрической проницаемости линейно связаны с главными напряжениями. Так, например, для пластинки, нагруженной в своей плоскости, одно главное напряжение , направленное нормально к пластинке (рис. 1, а), равно нулю и одна из главных плоскостей оптической симметрии совпадает с плоскостью пластинки. Если на пластинку D в круговом полярископе (рис. 2) падает свет перпендикулярно к её плоскости, то оптическая разность хода равна: = d (n1 — n2) или = cd (1 — 2), где d — толщина пластинки, (1и 2 — главные напряжения, с — т. н. относительный оптический коэффициент напряжений. Это уравнение (т. н. уравнение Вертгейма) — основное при решении плоских задач П.-о. м. и. При просвечивании монохроматическим светом в точках интерференционного изображения модели, в которых = m (m — целое число), наблюдается погашение света; в точках, где = (2m + 1)/2, — максимальная освещённость. На изображении модели (рис. 3) получаются светлые и тёмные полосы разных порядков m (картина полос). Точки, лежащие на одной и той же полосе, имеют одинаковую , т. е. одинаковые 1 — 2 = 2мах = /cd (гдемах — максимальные скалывающие напряжения). При белом свете точки с одинаковыми max соединяются линиями одинаковой окраски — изохромами.
Для определения 1 — 2 (или max) в данной точке достаточно определить с для материала модели и измерить компенсатором или можно определить (0 модели и подсчитать порядок полосы m (0 = /cd — разность главных напряжений в модели, вызывающих разность хода = ; с и 0 получают при простом растяжении, сжатии или чистом изгибе на образцах из материала модели). Т. к. при нормальном просвечивании плоской модели можно получить только разность главных напряжений и их направление, то для определения (1 и 2 в отдельности существуют дополнительные физико-механические способы измерения (1 + 2, а также графовычислительные методы разделения (1 и 2 по известным 1 — 2 и их направлению, использующие уравнения механики сплошной среды.
Для исследования напряжений на объёмных моделях применяется более сложная техника эксперимента. Объёмная модель часто исследуется с применением метода «замораживания» деформаций. Модель из материала, обладающего свойством «замораживания» (отверждённые эпоксидные, фенолформальдегидные смолы и др.), нагревается до температуры высокоэластического состояния, нагружается и под нагрузкой охлаждается до комнатной температуры (температуры стеклования). После снятия нагрузки деформации, возникающие в высокоэластическом состоянии, и сопровождающая их оптическая анизотропия фиксируются. Наглядно описать это явление можно при помощи условной двухфазной модели материала. При нагреве до 80—120 °С (высокоэластическое состояние) одна часть материала размягчается, другая остаётся упругой. Нагрузке, приложенной к нагретой модели, противостоит неразмягчающийся скелет. При охлаждении нагруженной модели до комнатной температуры размягчающаяся часть снова застывает («замораживается») и удерживает деформацию в скелете после снятия нагрузки. «Замороженную» модель распиливают на тонкие пластинки (срезы) толщиной 0,6— 2 мм, которые исследуют в обычном полярископе.
Описанный П.-о. м. и. применяется для изучения напряжений в плоских и объёмных деталях в пределах упругости в тех случаях, когда применение вычислительных методов затруднено или невозможно. П.-о. м. и. напряжений используется для изучения пластических деформаций (фотопластичность), динамических процессов, температурных напряжений (фототермоупругость), для моделирования при решении задач ползучести (фотоползучесть) и др. нелинейных задач механики деформируемого тела.
Разработан также метод оптически чувствительных наклеек (слоев), наносимых на поверхности натурных деталей. Слой оптически чувствительного материала наносится на поверхность металлической детали или её модели в жидком виде и затем подвергается полимеризации или наклеивается на деталь в виде пластинки; это обеспечивает равенство деформаций нагруженной детали и покрытия. Деформации в покрытии определяются по измеренной в нём разности хода в отражённом свете при помощи односторонних полярископов.
Так как П.-о. м. и. напряжений ведутся на моделях, то они заканчиваются переходом от напряжений в модели к напряжениям в детали.
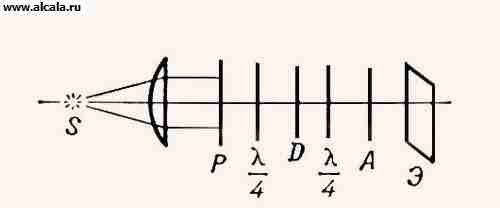
Рис. 2. Схема кругового полярископа: S — источник света, Р — поляризатор; D — пластинка; l/4 — компенсирующие пластинки; А — анализатор; Э — экран.
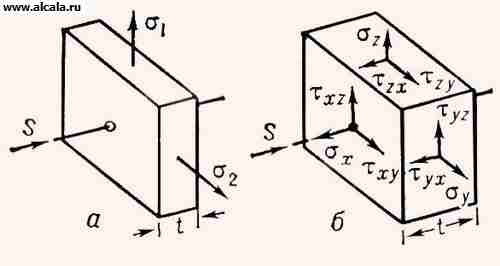
Рис. 1. Схемы: а — пластинки, нагруженной в своей плоскости; б — элемента объёма в напряжённом состоянии; s — нормальные; t — касательные напряжения.
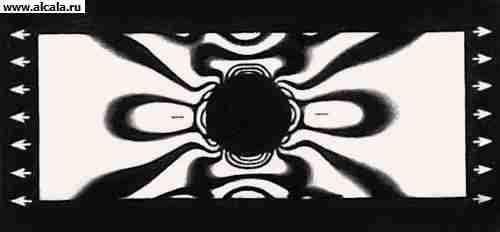
Рис. 3. Картина полос при равномерном растягивании пластинки с круглым отверстием.