29. Применение ортогональных фильтров для статистической идентификации сау.
Один из подходов к статической идентификации линейных САУ основан на разложении весовой функции R(t) в ряд вида:
 (1)
(1)
По некоторой
системе функций

В
практических приложениях ряда (1)
используется конечное число коэффициентов
m разложения
 .
.
Применив в (1) преобразование Лапласа, получим:
 (2), где
(2), где
![]() - преобразование по Лапласу
- преобразование по Лапласу

Выражение (2), записанное в частной области, обращается в уравнение:
 (3)
(3)
Модель САУ в виде (3) при конечном числе членов разложения и схеме формирования представлена на рисунке:
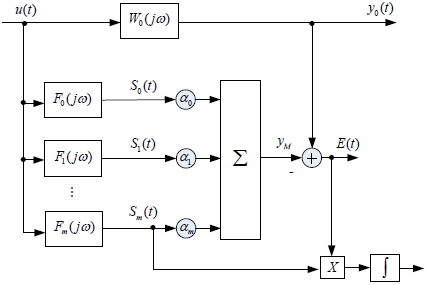
Задачей статической идентификации становится корректной, если в качестве входного воздействия используется сигнал с равномерной спектральной плотностью мощности в полосе частот, превышающей эквивалентную полосу пропускания системы.
Коэффициенты
 определим из условия минимизации
интегральной оценки средневзвешенного
квадрата погрешности аппроксимации
определим из условия минимизации
интегральной оценки средневзвешенного
квадрата погрешности аппроксимации
Средневзвешенный квадрат погрешности аппроксимации
Из условия минимума Ф
Получаем уравнение:

Или

Выберем ортогональную систему функций систему функций, учитывая свойства ортогональности:

Получим:
 (4)
(4)
То есть коэффициенты взаимно линейно независимы. Однако формула (4) не позволяет их определить, так как не известна K(t).
23. Построение диагностической модели чувствительности. Методы понижения порядка передаточной функции. Аналитическая и алгоритмическая модели чувствительности в методе поиска одиночных дефектов с использованием интегральных преобразований сигналов.
Диагностической моделью чувствительности назовем упрощенную модель чувствительности объекта диагностирования, используемую для вычисления диагностических признаков и эквивалентную полной модели чувствительности в отношении значений этих признаков. Рассмотрим принцип построения диагностической модели чувствительности на примере алгоритма поиска одиночных структурных дефектов с использованием интегральных преобразований сигналов. Для структурных дефектов условие эквивалентности двух дефектов записывается:

где

Условие (1) позволяет сокращать векторы структурной чувствительности на общие множители их элементов. Анализ выражения:

Показывает, что таким общим множителем для всех элементов вектора структурной чувствительности(для всех контрольных точек ОД) является величина

Которая представляет собой оценку ПФ первой модели (до перемычки) структурной модели чувствительности относительно выхода i-го ДЭ, умноженной на величину 1/W2(∝). После сокращения получим эквивалентный в смысле результатов поиска одиночных структурных дефектов вектор структурной чувствительности i-го динамического элемента
 -вектор-столбец
с единственным ненулевым элементом в
i-й строке.
-вектор-столбец
с единственным ненулевым элементом в
i-й строке.
Структурные чувствительности 𝑽𝒊 ДЭ ∝ представляют собой оценки передаточных функций объекта от входа i-го ДЭ до рассматриваемых выходов.
Диагностическая модель чувствительности структурных дефектов предоставляет собой передачи от выхода рассматриваемого блока до соответствующих контрольных точек.
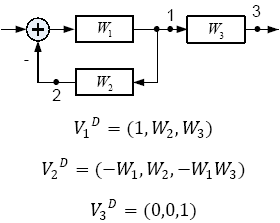
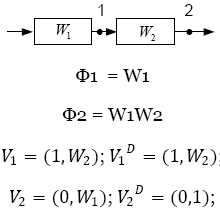
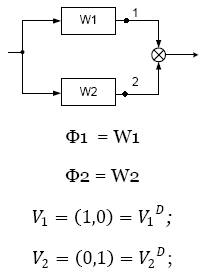
Рассмотрим векторы диагностических моделей чувствительности:
А) Последовательное соединение Параллельное соединение
Б) Встречно-параллельное соединение:
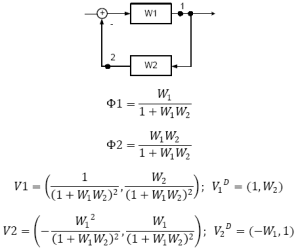
ДМЧ таким образом получается как определение передач от выхода рассматриваемого блока до соответствующей контрольной точки.
Передача от выхода рассматриваемого звена до КТ: