14. Структурные чувствительности блоков для типовых соединений звеньев. Понятие эквивалентного положения двух динамических элементов (дэ).
Структурная чувствительность
i-го блока
![]() .
.
Для выходной контрольной точки

Построим для трех контрольных точек:
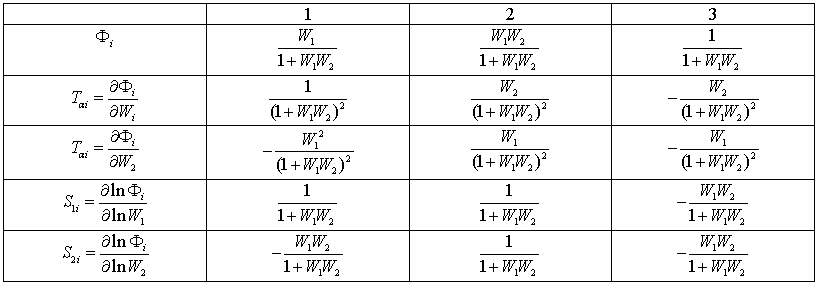
Относительные функции чувствительности имеют порядок ниже, чем абсолютные.
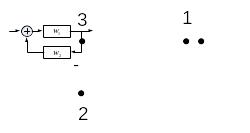
Эквивалентное положение 2-х динамических элементов, это такое их расположение в объекте, при котором соответствующие этим двум элементам дуги сигнального графа входят в одни и те же множества контуров и в одни и те же множества путей для каждой контрольной точки.
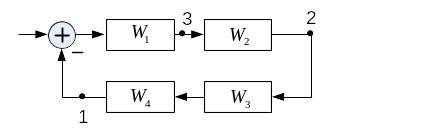
Применим определение эквивалентности:
- для 1 контрольной точки – все блоки эквиваленты;
- для 2 контрольной точки – попарно эквивалентны блоки 1 и 2, 3 и 4.
Свойство: если 2 динамических элемента с номерами i и j имеют эквивалентное положение в объекте, то их структурные чувствительности равны.
15. Условный алгоритм поиска одиночных структурных дефектов на основе МЧ.
Условный алгоритм диагностирования (при допущении, что дефект может возникнуть только в одном блоке) «условный», так как итерационный (следующий результат зависит
от предыдущего) (метод половинного деления):
1) назначаются сначала 2 контрольные точки, которые делят структурную схему на 2 фрагмента с 1 входом и 1 выходом;
2) вычисляются 2 диагностических признака из каждой группы;
3) по минимуму определяем где дефект;
4) добавляем контрольную точку там, где содержится дефект (по тому же принципу);
5) продолжаем до тех пор, пока не определим дефектный блок.
16. Вычисление коэффициентов структурной чувствительности на основе структурно-матричной модели (СММ).
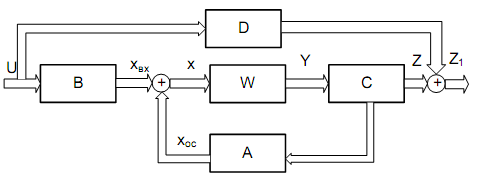
Структурно-матричная модель определяет соотношение между вектором выходных сигналов Y и входным сигналом U.
![]()
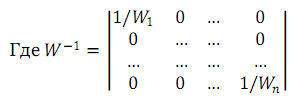
Матрица
передаточных функций:
![]() (1)
(1)
Модель
чувствительности получим, дифференцируя
выражение по
![]()
![]()
 ,
,
![]() .
.
Анализ выражения (*) показывает, что модель чувствительности в виде коэффициента влияния i-го блока может быть получена путем последовательного соединения двух одинаковых моделей объекта с передаточной функцией вида (1), когда вход i-го блока перовой модели соединен с выходом i-го блока второй модели:
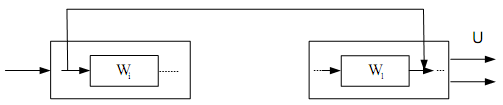
Модель структурной чувствительности.
Пример:
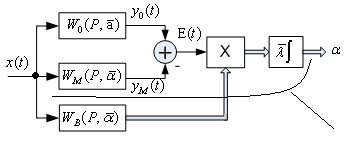
17. Количественные характеристики различимости одиночных параметрических дефектов на основе МЧ.
Кроме структурных
причин появления эквивалентных дефектов,
для которых характерно наличие точной
линейной зависимости соответствующих
вектор-функций чувствительности,
возможной причиной появления эквивалентных
дефектов обусловлены некоторыми
численными соотношениями параметров
модели (то есть существуют структурные
причины и существуют параметрические
причины) Для того, чтобы учесть все
множество параметрических причин,
необходимо сконструировать некоторую
количественную меру различимости двух
дефектов. Такая количественная мера
позволяет предварительно на этапе
анализа модели ответить на вопрос, какие
пары дефектов будут хорошо различимы,
а какие вообще эквивалентны. Требования
к количественных характеристикам
различимости: Должны учитывать все
особенности режима диагностирования
(контрольные точки, время регистрации,
диапазон регистрируемых частот или
время регистрации, входное воздействие,
размер интегральных преобразований).
Рассмотрим случай параметрического
дефекта:
![]() .
.
Пусть имеет
место дефект m (минимальное
значение
![]() ).Тогда
).Тогда
![]() .
.
Диагностический
признак, записанный для j-того
дефекта, вместо
![]() подставим
подставим
![]()

Шкала
численных значений коэффициента
различимости так же от
0 до 1 (как и в нормированном диагностическом
признаке). Экспериментальная
различимость
![]() .
.
Теоретическая
![]() .
.
18. Количественные характеристики различимости одиночных структурных дефектов на основе МЧ.
Выражение для диагностического признака:
Заменим в выражении для диагностического признака разность сигналов объекта и модели на другую функцию чувствительности и получим выражение для коэффициента различимости двух блоков:
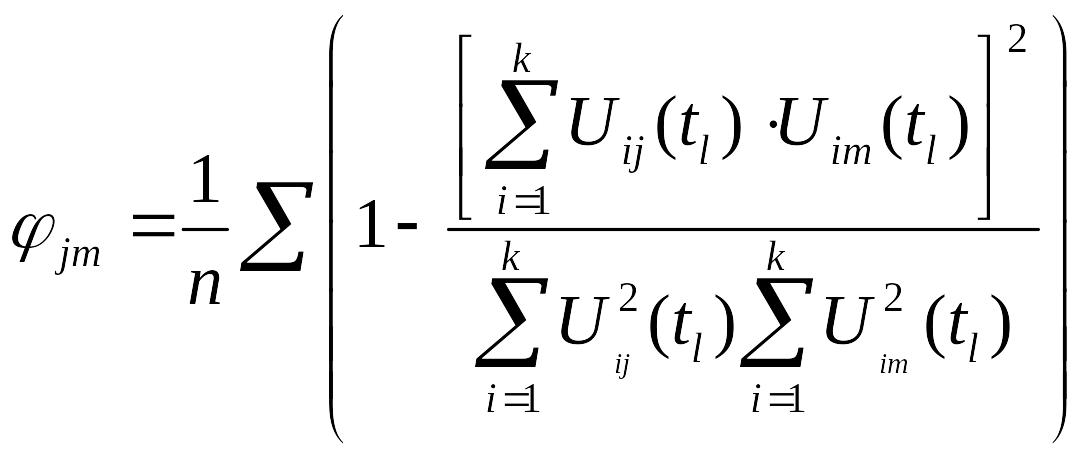

![]() -
угол между единичными векторами.
-
угол между единичными векторами.
19. Контроль динамического звена в составе системы управления.
Важность получения модели объекта управления (идентификация) объясняется следующими соображениями:
1) простейший случай разомкнутого управления:

Если
не знаем модель, то управлять объектом
оптимально, то есть
![]() .
.
Даже при разомкнутом управлении надо знать передаточную функцию объекта.
2) управление по возмущению

![]()
(принцип компенсации, так как Xв необходимо скомпенсировать)
3) принцип косвенного измерения
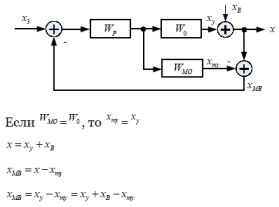
Перенесем сумматор:
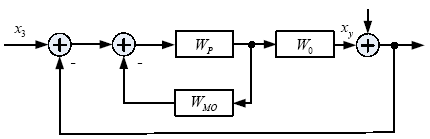
Используя принцип косвенной компенсации возмущения мы пришли к способу регулирования по отклонению. При всех трех фундаментальных принципах регулирования (разомкнутое, компенсационное, по отклонению) необходимо знать номинальную модель объекта, то есть проводить идентификацию.
20. Контроль параметров динамического звена на основе интегральных преобразований сигналов. Рассмотрим звено с известной передаточной функцией. Известна номинальная модель всей системы.

Во время контроля доступны только входные и выходные сигналы САУ, а сигналы блока недоступны. Во время контроля блока остальные блоки не изменяются. Будем применять интегральное преобразование сигналов.
![]() - формула Мезона.
- формула Мезона.
![]() (1)
(1)
![]() линейно
входит в
линейно
входит в
![]() => можно вынести
=> можно вынести
![]() (2) выразим
(2) выразим
![]() .
.
Из (2) вычисляем передаточную функцию контролируемого блока:
![]() (3)
(3)
Разница
![]() -
критерий, по которому оцениваем блок.
-
критерий, по которому оцениваем блок.
21. Понятие диагностической модели чувствительности. Примеры.
ДМЧ–упрощенная модель чувствительности объекта диагностирования, эквивалентная полной модели чувствительности в отношении диагностических признаков. Диагностическая модель чувствительности структурных дефектов представляет собой передачи от выхода рассматриваемого блока до соответствующих контрольных точек. Рассмотрим на примерах:
1. Последовательное соединение блоков:

Вектор
чувствительности по 1-му блоку:
![]() ,
,
По 2-му: полная
модель чувствительности
![]()
=> все подходит
под определение
![]() .
.
2. Параллельное соединение блоков:

![]()
![]()
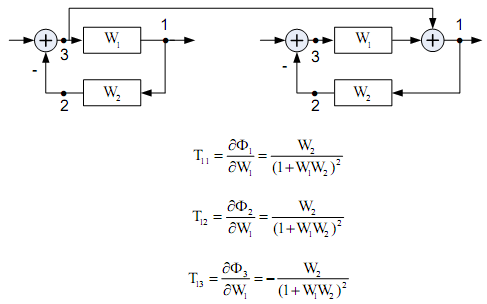
3.
Встречно-параллельное соединение
(отрицательная обратная связь):

![]()
![]()
22. Поиск дефектов, основанный на анализе таблиц состояний.

Рисунок – схема для исследования
![]() - множество
неработоспособных состояний
- множество
неработоспособных состояний
Пусть «0» - неработоспособен, «1» - работоспособен
Составим таблицу состояний:
|
TT1 |
TT2 |
TT3 |
TT4 |
TT5 |
s1 |
0 |
0 |
1 |
1 |
0 |
s2 |
1 |
0 |
1 |
1 |
0 |
s3 |
1 |
0 |
0 |
0 |
0 |
s4 |
1 |
1 |
1 |
0 |
0 |
s5 |
1 |
1 |
1 |
1 |
0 |
Постоим другую таблицу со всеми возможными парами состояний. Обозначим в ней «1» - различает, «0» - не различает. Таблица различимостей:
|
TT1 |
TT2 |
TT3 |
TT4 |
TT5 |
S1S2 |
1 |
0 |
0 |
0 |
- |
S1S3 |
1 |
0 |
1 |
1 |
- |
S1S4 |
1 |
1 |
0 |
1 |
- |
S1S5 |
1 |
1 |
0 |
0 |
- |
S2S3 |
0 |
0 |
0 |
1 |
- |
S2S4 |
0 |
1 |
1 |
1 |
- |
S2S5 |
0 |
1 |
0 |
0 |
- |
S3S4 |
0 |
1 |
1 |
0 |
- |
S3S5 |
0 |
1 |
1 |
1 |
- |
S3S5 |
0 |
1 |
0 |
1 |
- |
Достаточное количество проверок для этой схемы - первая, вторая, четвертая.
Если есть обратная связь:
В случае если есть обратная связь: с выхода пятого блока на вход 3-го (на рисунке обозначена серой линией):
Таблица состояний для схемы с обратной связью
|
TT1 |
тт2 |
тт3 |
тт4 |
тт5 |
S1 |
0 |
О |
О |
О |
О |
S2 |
1 |
О |
О |
О |
О |
S3 |
1 |
О |
О |
О |
О |
S4 |
1 |
О |
О |
О |
О |
S5 |
1 |
О |
О |
О |
О |
Рассмотренный подход в установившемся режиме не позволяет диагностировать систему с глубиной поиска дефектов, превышающих контур обратной связи.
25. Классификация методов идентификации.
Классификация методов идентификации по следующим альтернативным признакам:
Аналитические или компенсационные;
Статистические или детерминированные;
Градиентные или неградиентные;
Поисковые или безпоисковые;
1. Аналитическая проводится на основе анализа переходных процессов, частотных или других динамических характеристик совместно с входными сигналами с использованием аналитических зависимостей.
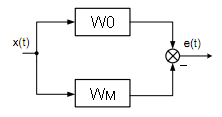
Компенсационные методы: применяют модели объектов, соединенных с объектом определенным образом и эти модели настраиваются в процессе идентификации, после завершения процесса настройки параметры модели используют для нахождения параметров объекта.
Различают компенсационные:
1. С параллельной моделью
2. С последовательной моделью
3. С последовательно-параллельной моделью.
Параллельная модель:
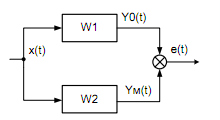
![]()
Последовательная модель:
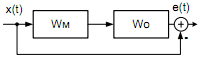
Условие
компенсации:
![]() ,
т.е. обратная передаточная функция.
,
т.е. обратная передаточная функция.
2. Статистические методы идентификации используют статистические(вероятностные) характеристики сигналов объектов идентификации.
 I=f(ai)
I=f(ai)
Детерминированные методы идентификации не используют вероятностные (статистические) характеристики сигналов объектов идентификации. Задача решается в детерминированном варианте.
3. Градиентные: содержат градиентные алгоритмы оптимизации меры количества I, движение к оптимальному значению I производится по градиенту в сторону уменьшения (по антиградиенту)
Неградиентные: не используют информацию о градиенте.
4. Поисковые – подача на вход специальных входных тестовых сигналов.
Безпоисковые – решение задач идентификации без подачи воздействий.
26. Метод вспомогательного оператора.
Компенсационный, градиентный метод идентификции.
Метод вспомогательного оператора используется как в системах идентификации, так и в адаптивных системах с эталонной моделью.