

3.2.2. Описание и конструкция привода колес на основе гибкой тросовой системы.
Это новое техническое решение задачи передачи вращательного момента между подвижными валами. Оно является наиболее эффективным из всех известных решений и получило широкое распространение в мировом автомобилестроении, в частности в виде приводов стеклоподъемников (рис. 11). В нашей модели мы будем использовать гибкий тросовый привод собственной конструкции, так как таких малогабаритных приводов промышленного производства нет. В настоящее время имеется кинематическая схема привода и первичные результаты экспериментов с прототипами несущих звеньев гибкого элемента привода.
Недостатками такого способа является большое трение внутри трубчатого ограничителя, создаваемого тросом при изгибе.
3.2.3. Описание и конструкция привода колес модели на основе зубчато-ременной передачи с переменной длиной ремня.
3.2.4. Конструкция привода устройства управления смещением кабины.
Список использованной литературы:
Хамуков Ю.Х., Кильчуков А.А., Разработка конструкции и создание действующей модели исследовательского планетохода на одноосном шасси, 2012 г.
Хамуков Ю.Х., Шереужев М.А., Разработка кинематической схемы и конструкции одноосного шасси робота с динамическим управлением остойчивостью, 2011.
Алхасов Р.М. Моделирование и адаптивное управление нетрадиционными транспортными средствами с одноосным шасси: Дисс. …к-та физ.-мат. наук. – Нальчик, 2000. 210 c.
Хамуков Ю.Х., Озов Р.М. Изобретение ''Одноосный вездеход''. Патент РФ №2102272
http://ru.wikipedia.org/wiki/Сегвей
Юрченко С.О., Алексеев В.О., Анализ динамических свойств движителя с ленточными демпферами-грунтозацепами, 2009.
С.А. Филиппов «Робототехника для детей и родителей», 2-е издание, издательство «Наука», 2011 г.
Белиовский А. Е., Белиовская Л. Г.. Программируем микрокомпьютер NXT в LabVIEW.- М.: ДМК,2009.
http://www.atmel.com/Default.aspx
Конспект «Механические передачи. Зубчатые передачи» Ульяновского Высшего Авиационного Училища Гражданской Авиации http://www.mehanica-kvs.narod.ru/razdel4/r42.html
Использованное программное обеспечение.
Microsoft Office Word 2010
Microsoft Office PowerPoint 2010
Microsoft Office Exel 2010
CorelDRAW Graphics Suite X4
Paint
Приложение
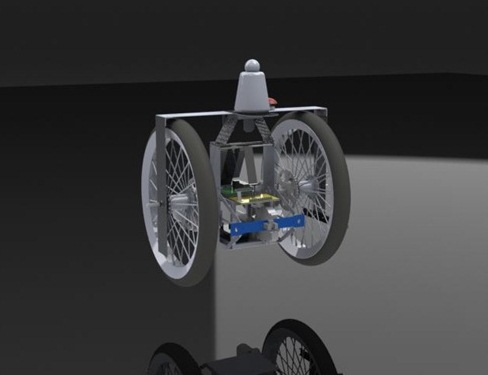
Рис. 1. Одноосные транспортные средства.

Рис. 2. Сегвей

Рис. 3. Maybach DRS

Рис. 4. iMo
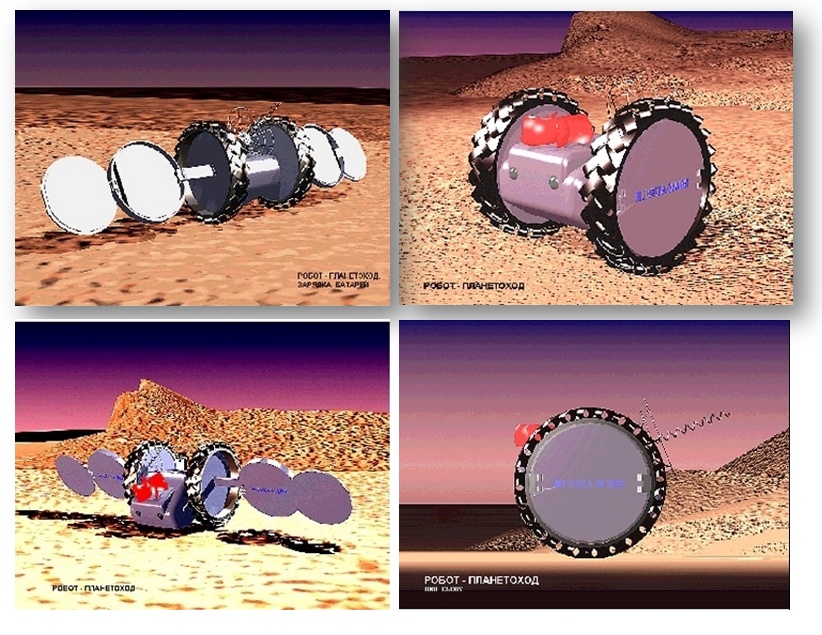
Рис. 5. Дизайн-концепт одноосного робота марсохода

Рис. 6. Конструкция движителя с леточными грунтозацепами: 1 – Обод колеса, 2 – ленточные грунтозацепы
А
 Б
Б
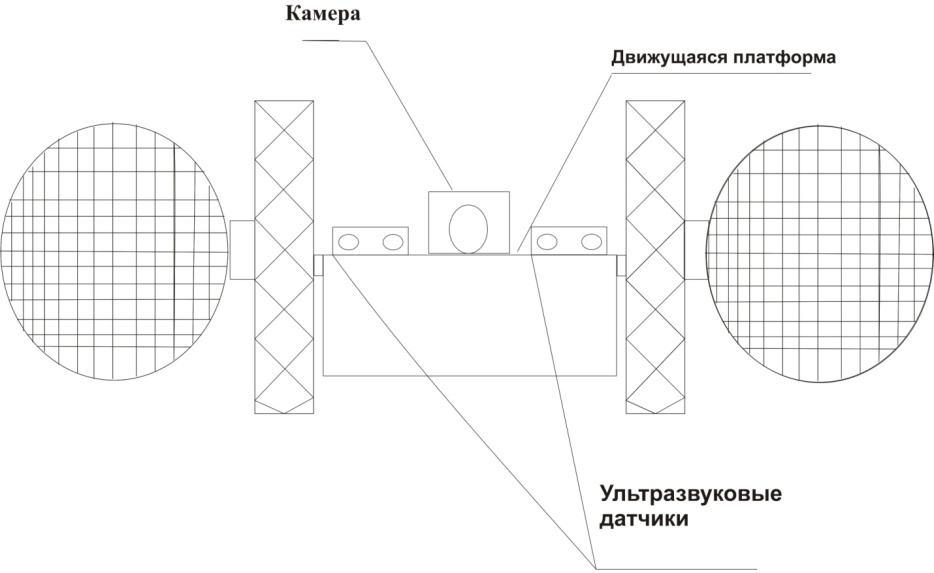
Рис 7. А – Компоновочная схема модели исследовательского марсохода на одноосном шасси.
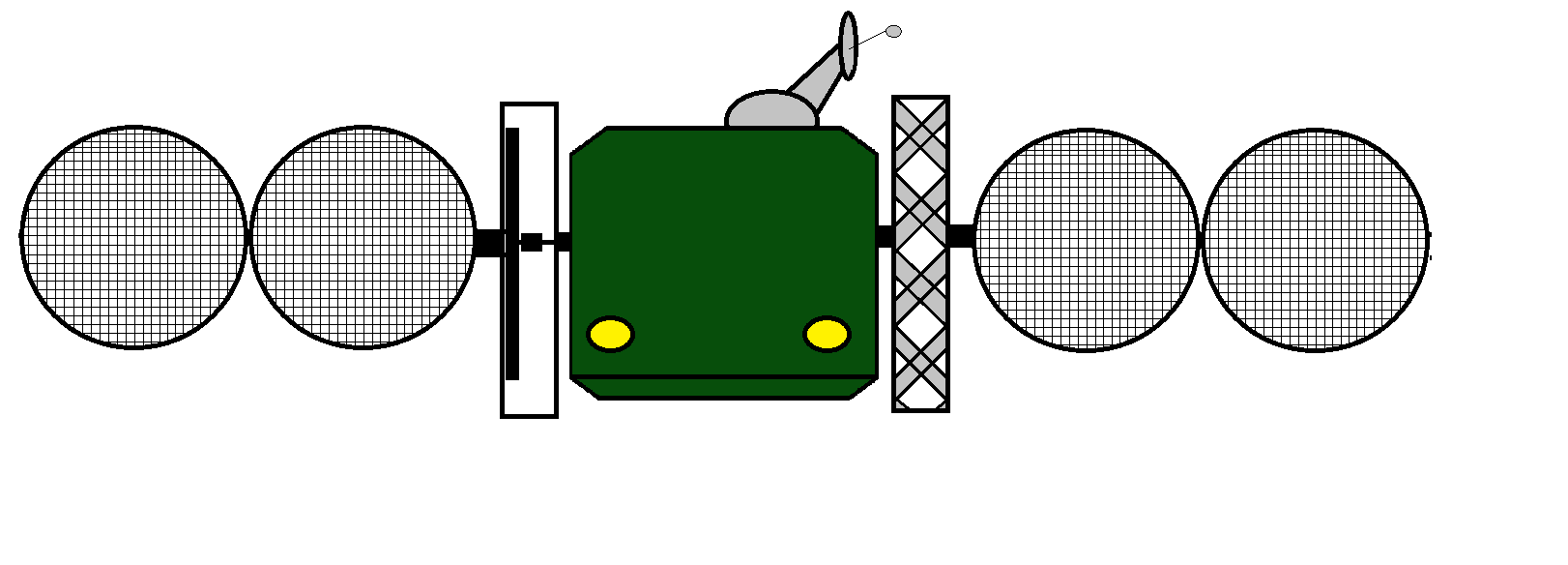
Б - Компоновочная схема конструкции исследовательского марсохода на одноосном шасси.
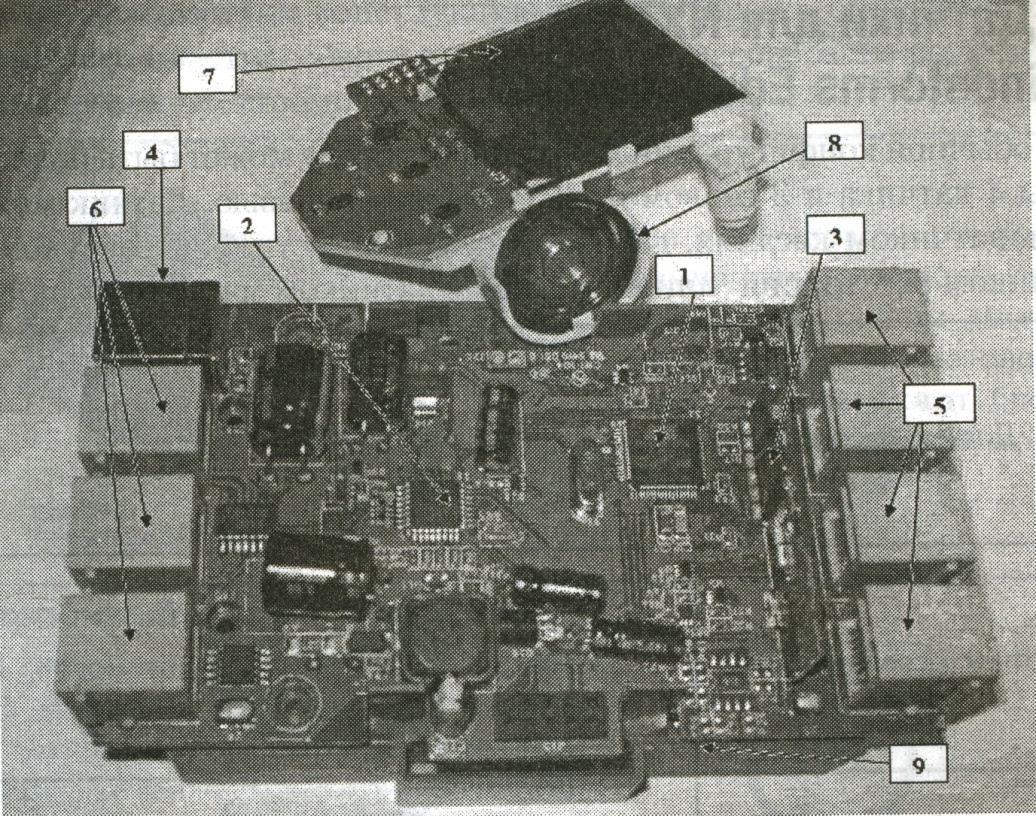
Рис. 8. Базовый
узел микроконтроллера NXT
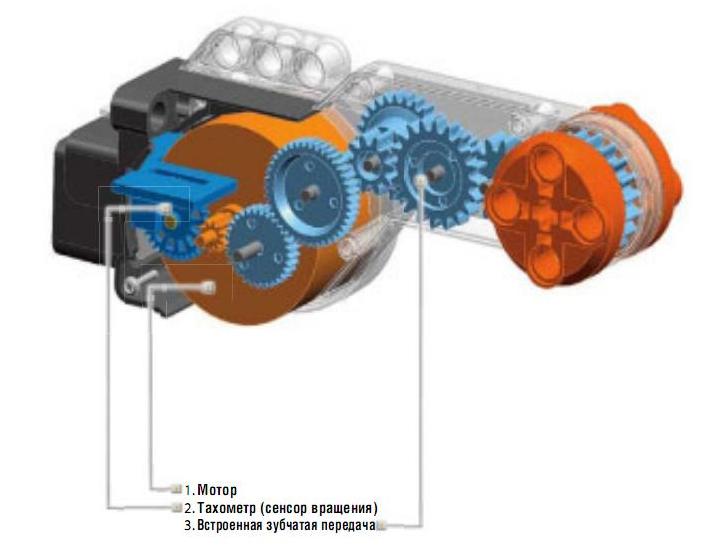
Рис. 9. Конструкция сервомотора

Рис. 9. Зубчатые передачи эвольвентного профиля

Рис. 10. Гибкий тросовый привод (привод стеклоподъемника
Глоссарий основных терминов и понятий
Робот - электромеханическое устройство с пневматическими, гидравлическими исполнительными органами или их комбинациями, предназначенное для замены человека в промышленности, опасных средах и др. Другое определение – мехатронное устройство, способное поддерживать стационарный неравновесный массо-энергообмен с внешней средой посредством целенаправленного изменения ее состояния.
Шасси - часть транспортного средства, включающая трансмиссию, ходовую часть и системы управления движениями. В нашем случае сюда же следует отнести и двигатель.
Остойчивость - способность плавучего средства противостоять внешним силам и возвращаться в состояние равновесия по окончании возмущающего воздействия. Также может применяться для описания способности сухопутного средства передвижения поддерживать ориентацию кабины относительно какой-либо координаты в пространстве.
Одноосный робот - робот на двухколейной двухколесной транспортной платформе, предназначенный для решения различных задач.
Сервопривод - привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения.
LEGO Mindstorms - это конструктор (набор сопрягаемых деталей и электронных блоков) для создания программируемого робота. Впервые представлен компанией LEGO в 1998 году. Через 8 лет (2006) в свет вышла модель LEGO Mindstorms NXT, а в 2009 — LEGO Mindstorms NXT 2.0.
NXT – электронный блок, является «мозгом» робота MINDSTORMS®. Это интеллектуальный, управляемый компьютером элемент конструктора LEGO® , позволяющий роботу MINDSTORMS «ожить» и осуществлять различные действия.
Планетоход - это космический аппарат, предназначенный для передвижения по поверхности другой планеты или небесного тела.
Космическая экспедиция – комплексная программа космических исследований, включающая доставку оборудования к внеземным объектам или на их поверхности. долговременное путешествие и исследование различных объектов в космическом пространстве (определения не нашел, сформулировал сам)
Космическая программа — долгосрочный план исследований околоземного космического пространства и планет Солнечной системы.
Космическая держава – страна, осуществляющая космические программы и располагающая для этого всеми необходимыми видами технологий и производств. державы, имеющие возможность запускать собственные ракето-носители.
Автономность — в системах связанного регулирования, независимость какой-либо одной из управляемых величин от изменений остальных управляемых величин. Другое определение – способность системы к длительному сохранению управляемости (жизнеспособности) за счет собственных ресурсов.
Интеллектуальность – способность системы к контекстной проактивности. автономная система, которая может принимать различные решения (определения не нашел, сформулировал сам)
Мотор-редуктор — агрегат, представляющий собой совмещённые в одном блоке двигатель и редуктор.
Датчик, сенсор — термин систем управления, первичный преобразователь, элемент измерительного, сигнального, регулирующего или управляющего устройства системы, преобразующий контролируемую величину в удобный для использования сигнал.
Web-камера (также вебкамера) — цифровая видео или фотокамера, способная в реальном времени фиксировать изображения, предназначенные для дальнейшей передачи по сети Интернет (в программах типа Skype, Instant Messenger или в любом другом видеоприложении).
Цифровой, цифровая - определение, относящееся к данным, состоящим из цифр, а также к процессам и функциональным устройствам, использующим эти данные
Аналоговый - предназначенный для работы с непрерывно меняющимися величинами, которые рассматриваются как аналоги исходных физических данных
Мультиагентный – объект-комплекс, состоящий из взаимодействующих автономных интеллектуальных агентов.
Нейросетевой - объект, представляющий собой математическую модель, или ее программно-аппаратную реализацию, построенную по принципу организации и функционирования биологических нейронных сетей — сетей нервных клеток живого организма.