


Содержание
Краткое описание работы механизма антенны радиолокатора……………………………..2 Исходные данные………………………………………………………………………………3
Глава 1. Синтез и анализ зубчатого механизма………………………………………………4
1.1 Расчёт параметров зубчатого зацепления………………………………………………...4
1.2 Определение размеров зубьев….………………………………………………………….7
1.3 Построение графиков………….……………………….…………………………………..8
1.4 Расчёт планетарного редуктора.………………………………………………………….11
Глава 2. Анализ и синтез кулачкового механизма…………………………………………..13
2.1 Схема исследуемого кулачкового механизма, исходные данные………………………13 2.2 Определение фазовых углов кулачкового механизма…………………………………..14 2.3 Вычисление графиков функции…...……………………………………………………...15 2.4 Определение основных размеров кулачкового механизма…..…………………………16 2.5 Построение профиля кулачка……………………………………………………………..16 2.6 Определение КПД ………..………………………………………………………………..21 Глава 3. Кинематический анализ рычажного механизма………………..…………………..23
3.1 Определение размеров кривошипно-коромыслового механизма……………………….23 3.2 Построение плана скоростей и ускорений для выбранного положения механизма.....24 3.3 Аналитический расчет….………………………………………………………………….26 3.6 Определение КПД……………………………..…………………………………………...28 3.7 Определение зон мультипликации……..…………………………………………………29
Глава 4. Силовой анализ рычажного механизма………..…………………………………....30
4.1 Определение недостающих значений необходимых для силового анализа…………...30 4.2 Построение плана сил для выбранного положения механизма метод планов......…….31 4.3 Определение силы зацепления Ft в червячной передаче….…………………………….32
Литература……………………………………………………………………………………...33
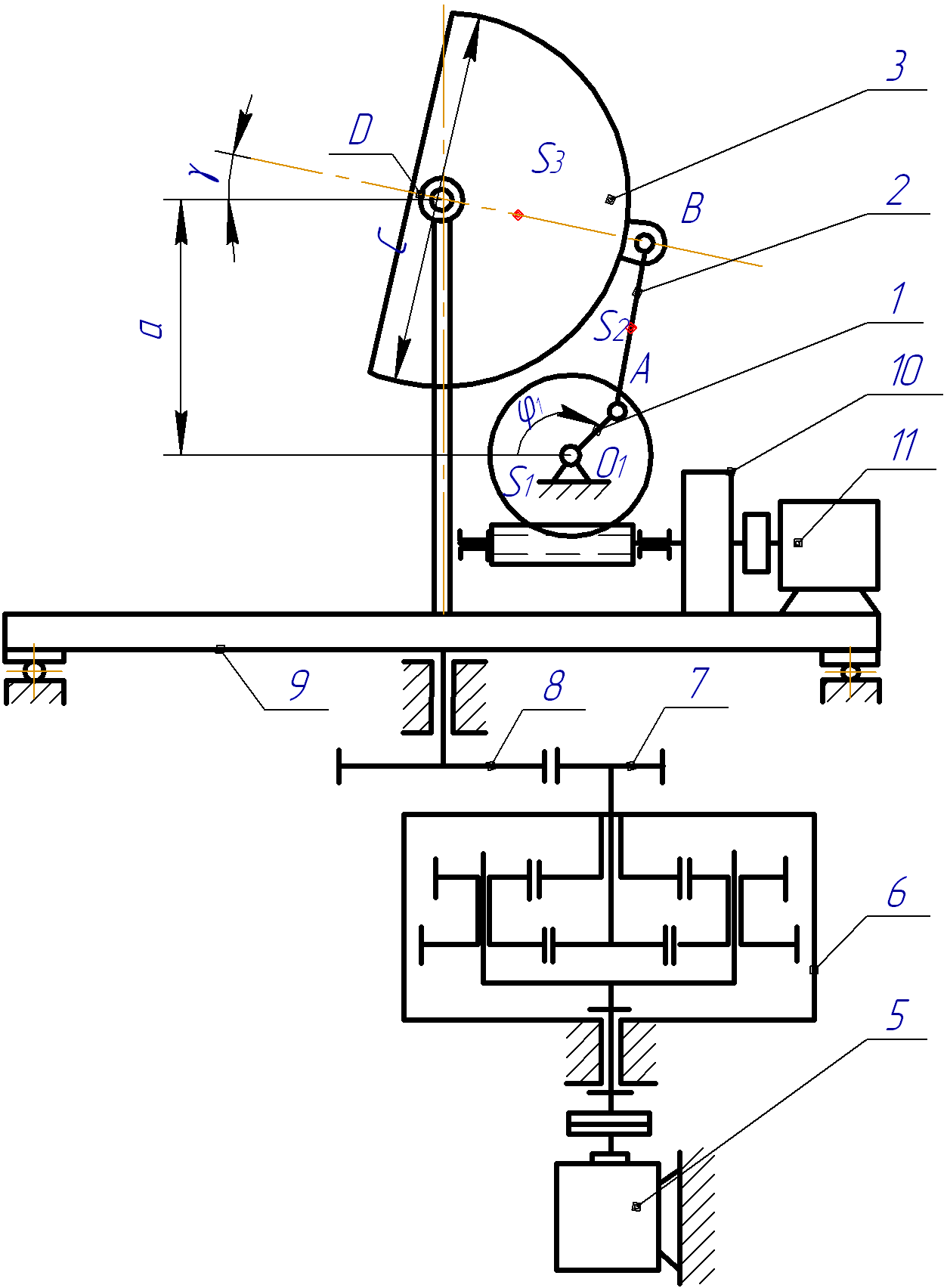
Антенна радиолокатора предназначена для обнаружения какой-либо цели в атмосфере. Рефлектор 3 антенны с облучателем 4 (рис. 13 - 1) совершает два основных движения: вращение вокруг вертикальной оси и одновременно колебание вокруг горизонтальной оси.
Рефлектор укреплен на платформе 9, вращение которой вокруг вертикальной оси осуществляется механизмом кругового обзора, включающим электродвигатель 5, планетарный редуктор 6 и цилиндрическую зубчатую передачу 7-8. Колебание рефлектора антенны вокруг горизонтальной оси осуществляется механизмом векторного обзора, установленным на платформе. Механизм секторного обзора антенны имеет самостоятельный электродвигатель 10, который передает вращение кривошипу 1 через планетарный редуктор 11 и червячную передачу. При помощи шатуна 2 движение от кривошипа 1 передается рефлектору, который совершает колебательные движения, отклоняясь от горизонтальной оси на угол .


 ИСХОДНЫЕ
ДАННЫЕ
ИСХОДНЫЕ
ДАННЫЕ
Наименование параметра |
Обозначение |
Размерность |
В №1 |
Число оборотов электродвигателя |
nд |
об/мин |
950 |
Число оборотов платформы антенны |
n9 |
об/мин |
30 |
Число колебании рефлектора |
n2 |
об/мин |
28.2 |
Угол отклонения облучателя от горизонтальной оси |
|
град |
10 |
Длина коромысла |
lBC |
м |
0,5 |
Расстояние между точками О и С механизма секторного обзора |
lOC |
м |
0,7 |
Вертикальная проекция межосевого расстояния |
a |
м |
0,4 |
Вес кривошипа с валом |
G1 |
H |
10 |
Вес шатуна |
G2 |
H |
30 |
Вес рефлектора с облучателем |
G3 |
H |
50 |
Отношение расстояния от точки A до центра масс S2 шатуна к общей длине шатуна |
lAS2/lAB |
|
0,30 |
Отношение расстояния от точки B до центра масс S3 рефлектора к длине lBC |
lAS3/lBC |
|
0,30 |
Диаметр рефлектора |
D |
м |
1,0 |
Момент инерции кривошипа 1, редуктора 11, ротора двигателя 10 относительно оси вала О |
JS1 |
кг· м2 |
1,0 |
Момент инерции шатуна относительно оси, проходящей через его центр тяжести |
JS2 |
кг· м2 |
0,10 |
Момент инерции платформы 9 (вместе с двигателем 10, редуктором 11, механизмом секторного обзора и рефлектором) относительно оси вращения платформы |
J'9 |
кг· м2 |
8,0 |
Момент инерции колеса 8 относительно оси вращения |
J8 |
кг· м2 |
0,005 |
Момент инерции колеса 7 и планетарного редуктора 6 относительно оси вращения колеса 7 |
J7 |
кг· м2 |
0,03 |
Маховой момент ротора двигателя 5 |
GD52 |
кг· м2 |
0,028 |
Коэффициент неравномерности вращения платформы антенны |
|
|
1/50 |
Скорость ветра |
V |
м/с |
30 |
Число зубьев колеса 7 |
z7 |
|
9 |
Число зубьев колеса 8 |
z8 |
|
17 |
Модуль зубчатых колес 7 и 8 |
m |
мм |
4 |

 ОСНОВНАЯ
ЧАСТЬ
ОСНОВНАЯ
ЧАСТЬ
1.СИНТЕЗ И АНАЛИЗ ЗУБЧАТОГО МЕХАНИЗМА