

6.3 Расчет переходных процессов системы регулирования скорости
Из определения передаточной функции получим общий вид уравнения переходного процесса в системе регулирования скорости в операторной форме
![]() (58)
(58)
где ![]() – передаточная функция замкнутого
контура регулирования скорости;
– передаточная функция замкнутого
контура регулирования скорости;
![]() – сигнал задания скорости в операторной
форме записи.
– сигнал задания скорости в операторной
форме записи.
При ступенчатом воздействии сигнал задания скорости в операторной форме записи имеет вид
 (59)
(59)
где ![]() – изменение данного сигнала 16 мА.
– изменение данного сигнала 16 мА.
Значение задается в пределах не более 10 – 20 % от номинального значения данного. Принимаем
![]() (60)
(60)
Подставив числовые значения в формулу (60), получим
![]()
Подставив числовые значения в формулу (59), получим
Передаточная функция замкнутого контура регулирования скорости имеет вид
 (61)
(61)
Подставив числовые значения в формулу (61), получим
Подставив числовые значения в формулу (58), получим

Для нахождения оригинала воспользуемся теоремой обращений.
Пусть
 (62)
(62)
Тогда
 (63)
(63)
где n – количество корней характеристического уравнения;
рi – корни уравнения.
Запишем
![]()
![]()
![]()
Найдем корни уравнения
![]() с помощью программного обеспечения
«MathCad»
с помощью программного обеспечения
«MathCad»
![]()
![]()
Запишем полученные корни в показательной форме
![]()
![]()
Определяем
![]()
![]()
![]()
 (64)
(64)
 (65)
(65)
 (66)
(66)
Подставив числовые значения в формулы (64), (65), (66), получим

Таким образом, уравнение (63) примет вид

Определяем время переходного процесса
![]() (67)
(67)
где ![]()
Подставив числовые значения в формулу (67), получим
Диапазон времени разбиваем на 20 интервалов с постоянным шагом ∆t = 0,016 с.
Для того чтобы построить график переходного процесса для нескольких значений времени, определяем значения скорости вращения. Результаты расчетов заносим в таблицу 22.
По результатам расчетов построим график переходного процесса. График переходного процесса представлен на рисунке 14.
Таблица 22 – Результаты расчетов для построения графика переходного процесса
t, с |
ω, рад/с |
t, с |
ω, рад/с |
|
0 |
0,01 |
0,176 |
47,83 |
|
0,016 |
3,37 |
0,192 |
47,57 |
|
0,032 |
10,87 |
0,208 |
47,21 |
|
0,048 |
19,65 |
0,224 |
46,83 |
|
0,064 |
27,97 |
0,24 |
46,50 |
|
0,08 |
34,92 |
0,256 |
46,24 |
|
0,096 |
40,20 |
0,272 |
46,05 |
|
0,112 |
43,85 |
0,288 |
45,92 |
|
0,128 |
46,13 |
0,304 |
45,85 |
|
0,144 |
47,35 |
0,32 |
45,81 |
|
0,16 |
47,83 |
|
||
6.4 Анализ переходных процессов
По графику переходного процесса (рисунок 14) определяем следующие показатели переходного процесса:
1) время достижения максимального значения tmax = 0,168 c;
2) время переходного процесса tпп = 0,275 с;
3) время регулирования tр = 0,128 с, за которое регулируемая величина ω первый раз достигает установившегося значения ωуст;
4)
установившаяся скорость вращения
![]()
5) конечная скорость ωкон = 45,81 рад/с;
6) максимальная скорость вращения ωmax = 47,83 рад/с;
7) статическая ошибка
 (68)
(68)

8) динамическая ошибка
 (69)
(69)

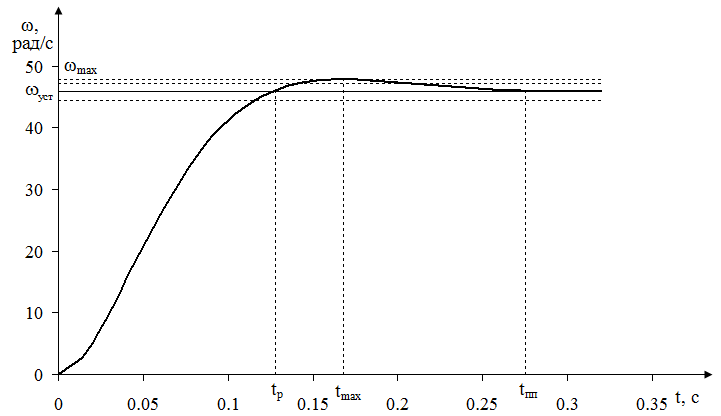
Рисунок 14 – График переходного процесса
Проведем проверку полученного уравнения переходного процесса
![]() (70)
(70)
![]()
При t = 0 получим
![]()