

5.3 Анализ статической устойчивости системы электропривода
Условие устойчивости системы электропривода
 (41)
(41)
Для анализа устойчивости системы электропривода насоса Н-8 изобразим одну из точек пересечения механических характеристик насоса и электродвигателя (рисунок 13).
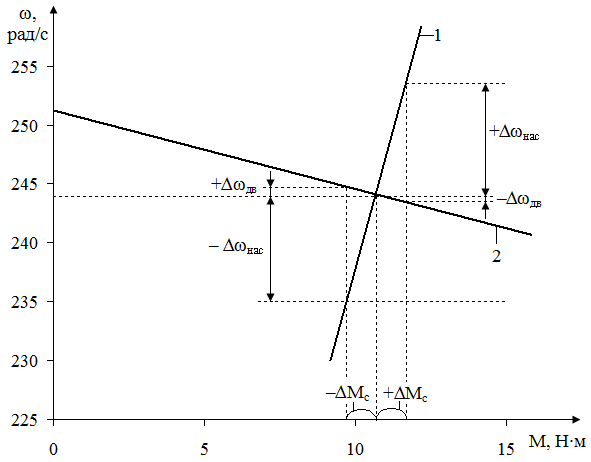
1 – механическая характеристика насоса;
2 – механическая характеристика двигателя
Рисунок 13 – График для анализа статической устойчивости
При изменении момента сопротивления
![]() получаем
получаем
![]() и
и
![]() .
Проверяем условие устойчивости
.
Проверяем условие устойчивости
При изменении момента сопротивления
получаем
![]() и
и
![]() .
Проверяем условие устойчивости
.
Проверяем условие устойчивости
Условия выполняются.
6 Расчет динамических характеристик системы электропривода
6.1 Расчет параметров передаточных функций звеньев
В качестве регулятора скорости асинхронного двигателя используется преобразователь частоты, передаточная функция которого равна коэффициенту передачи по каналу управления частотой
 (42)
(42)
где ![]() – номинальная скорость вращения
магнитного поля статора, рад/с;
– номинальная скорость вращения
магнитного поля статора, рад/с;
![]() – управляющий сигнал,
= 16 мА.
– управляющий сигнал,
= 16 мА.
Определяем передаточную функцию для электромеханического преобразователя
 (43)
(43)
где βe – модуль жесткости механической характеристики рабочего участка, Н∙м∙с/рад;
![]() – электромагнитная постоянная времени,
c.
– электромагнитная постоянная времени,
c.
Рассчитываем электромагнитную постоянную времени
 (44)
(44)
где fс – частота сети, fc = 50 Гц.
Определяем критическое скольжение
![]() (45)
(45)
где sн – номинальное скольжение.
Подставив числовые значения в формулы (45), (44), получим
![]()

Определяем передаточную функцию для механического преобразователя
 (46)
(46)
Определяем суммарный момент
![]() (47)
(47)
где ![]() – момент инерции центробежного насоса,
кг·м2.
– момент инерции центробежного насоса,
кг·м2.
Определяем момент инерции центробежного насоса
![]() (48)
(48)
Подставив числовые значения в формулы (48), (47), получим
![]()
![]()
Определяем модуль жесткости механической характеристики рабочего участка
 (49)
(49)
Рассчитываем синхронную скорость вращения двигателя
![]() (50)
(50)
где n0н = n1 – синхронная скорость вращения двигателя, об/мин.
Подставив числовые значения в формулу (51), получим
![]()
Рассчитываем коэффициент обратной связи по скорости
 (51)
(51)
где ![]() – сигнал на выходе звена обратной связи,
= 16 мА.
– сигнал на выходе звена обратной связи,
= 16 мА.
Определяем коэффициент связи между скоростью вращения и моментом сопротивления
![]() (52)
(52)
На рисунке 11 по таблице 20 выбираем 2 произвольные точки, в которых Mc1 = 17 Н·м, ω1 = 300 рад/с; Mc2 = 13,4 Н·м, ω2 = 270 рад/с. Определим изменение момента сопротивления и скорости вращения
![]()
![]()
![]()
![]()
Подставив числовые значения в формулы (49), (46), (42), (43), (51), (52), получим

![]()
![]()
![]()
6.2 Расчет системы автоматического регулирования скорости
В соответствии со структурной схемой (рисунок 10) передаточная функция объекта регулирования скорости имеет вид
![]() (53)
(53)
 (54)
(54)
 (55)
(55)
Подставив числовые значения в формулу (54), получим
Подставив числовые значения в формулу (55), получим

Настройка контура регулирования скорости производится на технический оптимум. Передаточная функция разомкнутого контура регулирования скорости имеет вид
 (56)
(56)
где
![]() – сумма малых постоянных времени в
объекте компенсирования скорости,
– сумма малых постоянных времени в
объекте компенсирования скорости,
![]()
Подставив числовые значения в формулу (56), получим

В соответствии с методом последовательной коррекции передаточная функция регулятора скорости примет вид
 (57)
(57)
Подставив числовые значения в формулу (57), получим
