

Индуктивные датчики
1) Однотактный ид.
Однотактный индуктивный датчик предназначен для измерения сравнительно малого углового или линейного механического перемещения (от доли микрометра до 3;5 мм) и для преобразования его в электрический сигнал переменного тока.
Индуктивный датчик представляет собой электромагнитный дроссель, индуктивность которого изменяется в зависимости от перемещения одной из деталей магнитопровода (якоря 3).
На рисунке представлена простейшая нереверсивная схема индуктивного датчика с плоскопараллельным воздушным зазором: сердечник 1 и якорь 3 выполнен из шихтованного магнитомягкого материала; 2 – медная обмотка. Частота f = 50 Гц (до нескольких кГц).



Графически статическая характеристика индуктивного датчика: 1- идеальная (хх); 2- реальная (нагрузочная).
Отклонение
реальной характеристики от идеальной
при малых величинах δ
объясняется
тем, что условие
 вносит погрешность, так как эти величины
соизмеримы при малых δ.
При больших значениях δ
допущение
вносит погрешность, так как эти величины
соизмеримы при малых δ.
При больших значениях δ
допущение
 также
вносит погрешность, так как активное
сопротивление цепи
также
вносит погрешность, так как активное
сопротивление цепи
 соизмеримо с индуктивным
соизмеримо с индуктивным
 .
.
Угол
наклона

Недостатки:
1) фаза выхода сигнала не зависит от направления перемещения якоря.
2) наличие тока холостого хода.
3) большое значение входных усилий, уравновешивающих тяговое усилие электромагнита.
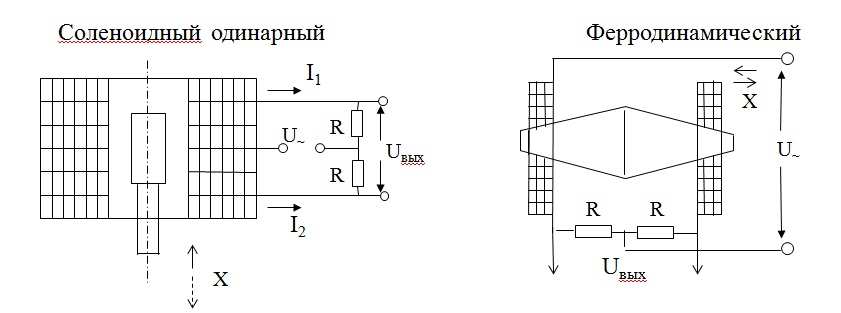
2) Двухтактные ид.
Существует 2 основных схемы включения индуктивных датчиков:
1) дифференциальная схема
Р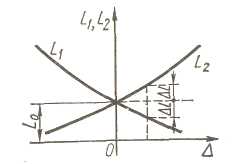
 ассматривается
разность токов в обмотках
ассматривается
разность токов в обмотках
Iвых=I1-I2, Uвых=(I1-I2)RН, Uвых=f(∆)
В исходном положении
при
 .
.
При перемещении якоря на величину Δ

2) Мостовая схема включения.
Рассматривается разность падения напряжения на плечах моста:


Индуктивные датчики до 2-х перемещений.
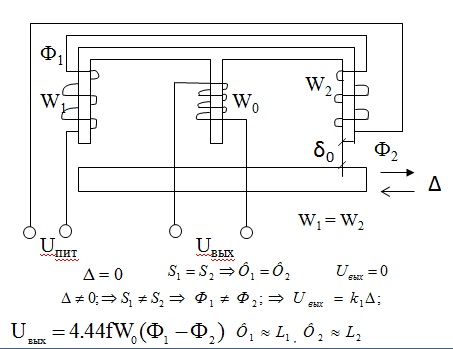
Трансформаторные индукционные датчики.
Трансформаторные индуктивные датчики предназначены для измерения изменения положения объекта, представляющего собой механическое перемещение малого или большого диапазонов. Принцип действия основан на использовании изменения взаимной индуктивности между обмотками при перемещении с якорями. Обмотка с числом витков W1 и W2.
Датчики ферродинамического типа и микросины предназначены для бесконтактного измерения угловых перемещений и их преобразования в пропорциональные значения электрического сигнала переменного тока.
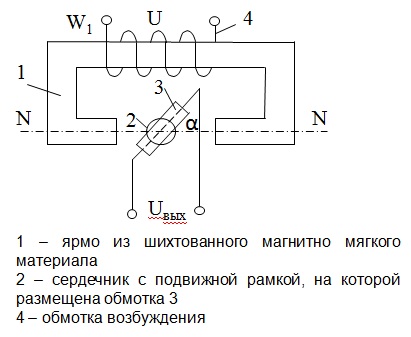
Микросин
1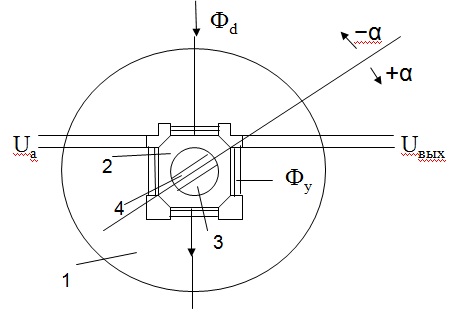 – статор, ротор 2 состоит из 2 частей: 3
– немагнитной, 4 – магнитной;
– статор, ротор 2 состоит из 2 частей: 3
– немагнитной, 4 – магнитной;
На полюсах статора расположены 4 обмотки, к которым подводится питающее напряжение. При подаче напряжения переменного тока возникают взаимно перпендикулярные магнитные потоки. Амплитуда потоков определяется положением ротора относительно полюсов статора.
Когда ось ротора находится под углом 450 к поперечной оси статора, амплитуды потоков Φд и Φу равны, ЭДС равна нулю.
Катушки выходной обмотки соединены встречно на каждом из двух соседних полюсов. При повороте ротора на угол α, величина одного из магнитных потоков уменьшится, а другого увеличится, и в выходной обмотке появится ЭДС Е = кα.
Прямая зависимость существует для α = ± 450 .
Амплитуда магнитного потока Ф зависит от направления вращения ротора.
Датчики ферродинамического типа и микросины предназначены для бесконтактного измерения угловых перемещений и их преобразования в пропорциональные значения электрического сигнала переменного тока.