

Реостатные измерительные преобразователи (пип)
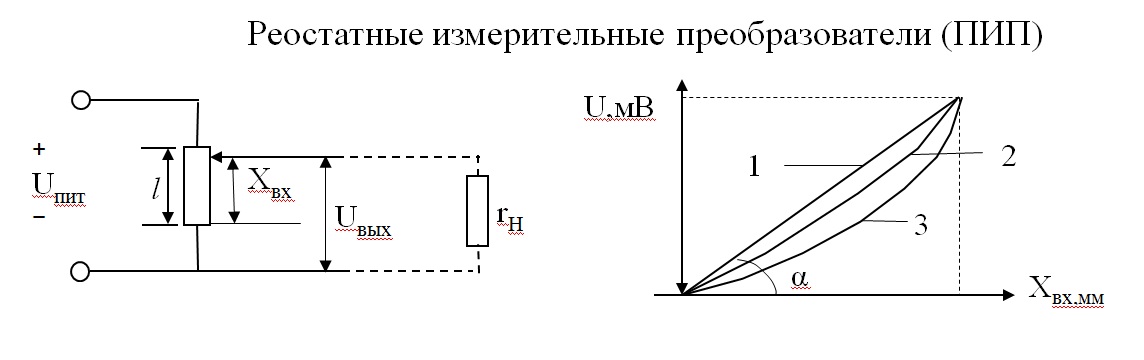
Витки имеют равномерную намотку, поэтому статическая характеристика близка к линейной. Если величина Хвх – это есть линейное перемещение, то запись статической и математической характеристики примет вид Хвх = ke.
Если величина Хвх, есть α, то статическая характеристика Хвх = k*α, а k = tg α, где k – чувствительность датчика и равен Uпит / L.
1 – имеет сопротивление rn = ∞ и сопротивление самого датчика r0 = 0;
2 – при r0* rn = 0,5
3 – при r0 = rn.
Чувствительность датчика составляет 3-5 В/мм.
Ступенчатость статической характеристики
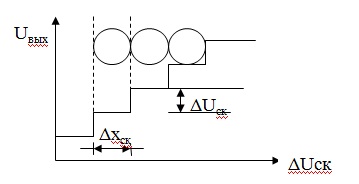
Величина скачка напряжения при переходе ползунка с одного витка на другой ∆Uск=Uпит/W, W-число витков
Порог чувствительности Xпор=l/W
Входное усиление на ползунке зависит от силы нажатия ползунка на намотку (контактное усиление) и от коэффициента трения.
Мощность сигнала на выходе: Pвых=Pн=U2вых/Rн.
Потребляемая мощность: Pпотр=U2пит/Rобм.
В САР необходимо, чтобы с изменением знака отклонение входного сигнала (регулируемой величины) от заданного значения изменялся и знак сигнала управления. Для этого используются схемы включения ПИП, образующие двухтактный реверсивный реостатный преобразователь, в котором знак выходного сигнала соответствует знаку входного.
Линейные датчики
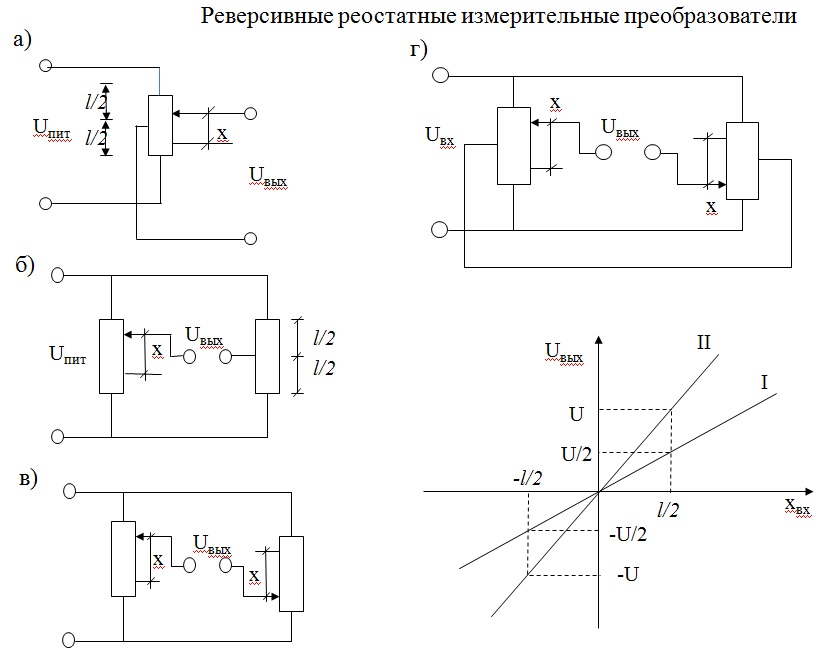
Для схем с 2-я ползунками рис. (в) и рис. (г) статическая характеристика соответствует виду II, а рис. (а) и рис. (б) статическая характеристика соответствует виду I. Чувствительность схем с 2-я ползунками выше чем с одним.
Нелинейные датчики.
В этих датчиках связь выходного сигнала и входной величины может быть описано математическими зависимостями вида:

Для получения статической характеристики необходимо:
1) Изменить диаметр проволоки в намотке;
2) Изменить шаг обмотки;
3) Применяют каркас сложного профиля;
4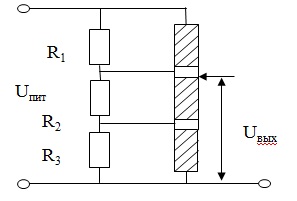 )
Шунтируют участки линейных потенциометров
сопротивления случайной величины.
)
Шунтируют участки линейных потенциометров
сопротивления случайной величины.
Погрешности датчика могут быть вызваны люфтом в конструкции подвижного контакта и ослабления щётки (контакта) при изменении нагрузки.
Динамические свойства: при чисто активной нагрузке ПИП можно рассматривать как безинерционное усилительное звено: W(p)=k; при индуктивной нагрузке с наличием активной составляющей – как инерционное звено первого порядка: W(p)=k/(Tр+1).
Преимущества ПИП: простота конструкции, возможность получения линейной статической характеристики с высокой точностью, возможность работы на постоянном или переменном токах, малые переходные сопротивления, низкий температурный коэффициент сопротивления.
Недостатки: возможность отказов из-за наличия скользящего подвижного контакта (окисление, стирание контактной дорожки), сравнительно небольшие чувствительность и порог чувствительности ∆Xпор>Dпров , что ограничивает применение при измерении малых перемещений; ограниченное использования при переменном токе повышенной частоты(до 1 кГц).
Для преодоления отмеченных недостатков проволочных ПИП используют:
1) непроволочные потенциометры с резистивными элементами на основе проводящей пластмассы: отличаются высокой разрешающей способностью, низким уровнем шумов, возможностью работы на высоких скоростях перемещения токосъёмника и высоких частотах;
2) фотоэлектрические и магниторезистивные потенциометры: отличаются повышенной износоустойчивостью, высокой надёжностью и скоростью регулирования выходного сигнала
Недостаток:
высокое переходное сопротивление.
3) жидкостные потенциометры, резистивные элементы которых получают спеканием смеси стекла с порошком окиси палладия, серебра или золота с органическим пластификатором;
4) потенциометры на эффекте Холла, МДП - структурах (металл, диэлектрик, полупроводник), на различных электрохимических явлениях.