Виды автоматических систем.
В зависимости от выполняемых функций все системы можно разделить на 4 группы:
1. Система автоматического управления (САУ).
2. Система автоматического регулирования (САР).
3. Система автоматического контроля (САК).
4. Система автоматической защиты (САЗ).
Под САУ следует понимать системы, которые обеспечивают перевод координат ОУ из точки начального положения в заданную точку. В зависимости от характера движения САУ делятся на 5 видов:
- простые СУ (нагрев печи);
- системы оптимального управления, при котором движение координат ОУ к заданной точке протекает за определенное время (когда скорость нагрева печи ограничена технологическим процессом);
- системы программного управления: движение осуществляется по заданной программе (металлорежущие станки);
- системы экстремального управления (системы, в которых самостоятельно определяется наивыгоднейший режим работы ОУ);
- системы функционального управления (когда движение начинается при выполнении совокупности операций).
Под САР понимается система, в которой после вывода координат объекта в заданную точку эти координаты следует удерживать в окрестности этой точки при действии на объект различных возмущающих воздействий. Могут работать по замкнутому, разомкнутому и комбинированному циклам. Бывают статические и астатические. По характеристикам звеньев, входящих в систему: линейные и нелинейные, импульсные и релейно – импульсные.
Под САК понимают системы, которые контролируют параметры технологических процессов или состояния объектов управления. Обычно являются разомкнутыми (звуковая или световая сигнализация).
САЗ используются для отключения поврежденного ОУ или для прекращения хода всего технологического процесса.
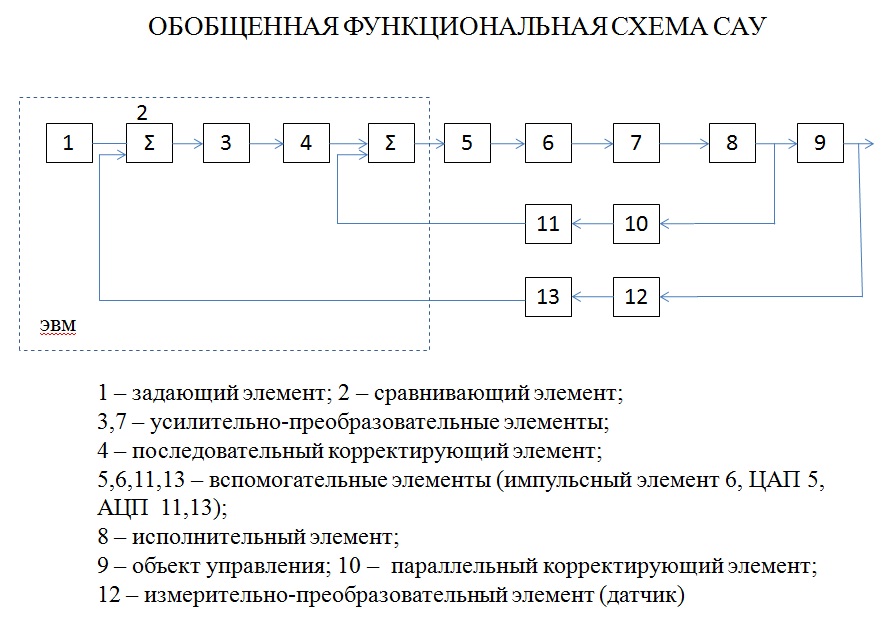
Функциональная схема САУ.
Управление каким-либо объектом — это процесс воздействия на него с целью обеспечения требуемого течения процессов в объекте или требуемого изменения его состояния. Основой управления является переработка информации о состоянии ОУ. ОУ может принадлежать к живой и к неживой природе.
Управление может осуществляться как человеком, так и техническим устройством. Управление без участия человека называется автоматическим. Техническое устройство, с помощью которого осуществляется автоматическое управление, называется управляющим устройством.
Совокупность УУ и ОУ составляет САУ. Состояние ОУ характеризуется выходной величиной х, на вход ОУ подается управляющее воздействие U.
F – возмущающее воздействие или помеха, которое изменяет состояние ОУ и препятствует управлению.
Хз – задающее воздействие, содержащее информацию о цели управления, т.е. о требуемом значении x.
Вычислительное устройство (измерительное устройство, датчик) служит для измерения подаваемых на УУ воздействий и сигналов Х, Х3, F. Реализует алгоритм работы УУ.
Исполнительное устройство служит для непосредственного управления объектом, для изменения его состояния в соответствии с сигналами, выдаваемыми ВУ.
В состав САУ могут входить различные специальные устройства - преобразователи.