

2. Программа работы:
Изучить методические указания
Изучить эскиз изделия и проанализировать возможные варианты
технологии его изготовления.
Определить возможности применения робота «ТУР-10» в технологическом процессе изготовления изделия.
Определить необходимые перемещения манипулятора, ввести программу перемещений в память робота и воспроизвести эту программу.
Оформить и сдать отчет по работе.
3. Промышленный робот "тур-10"
Промышленный робот "ТУР-10" - технологический универсальный робот с грузоподъемностью 10 кг. Это робот с позиционной системой управления и электромеханическим приводом. Общий вид робота с указанием габаритных и присоединительных размеров представлен на рис.1.
Робот состоит из:
манипулятора, имеющего 5 степеней подвижности,
устройства числового программного управления УПМ-772,
блока управления электроприводами (БУЭП)
пневмопанели, соединенных между собой кабелями связи и пневмопроводом.

Рис.1. Общий вид промышленного робота "ТУР-10"
Основными узлами манипулятора являются: механизм поворота, механическая рука, электромеханические приводы и механизм уравновешивания. Механизм поворота, предназначенный для поворота механической руки вокруг вертикальной оси на 340, содержит неподвижное основание и поворотную платформу. На основании установлены мотор- редуктор (электродвигатель и волновой редуктор) и датчик положения. Выходной вал редуктора при помощи компенсирующей муфты и вала соединен с плитой поворотной платформы. Вращение на датчик передается от вала редуктора через зубчатую передач). Механическая рука манипулятора предназначена для перемещения захватного устройства в вертикальной плоскости по четырем степеням подвижности.
Все электромеханические приводы звеньев механической руки аналогичны. Каждый привод содержит электродвигатель, волновой редуктор, датчик положения и тахогенератор. Геометрические размеры рабочей зоны манипулятора показаны на рис.2.
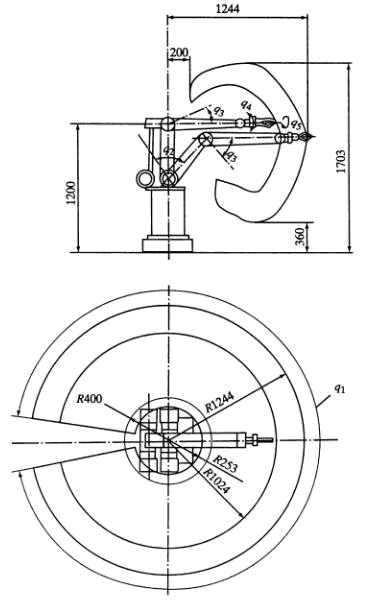
Рис. 2. Размеры звеньев промышленного робота "ТУР-10"
![]()
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Число степеней подвижности 5
Система координат угловая
Вид провода электромеханический
Способ управления позиционный
Способ программирования обучение
Объем памяти, кадров 300
Номинальная грузоподъемность (включая 10
захватное устройство, кг, не более)
Максимально допустимый момент инерции относительно оси шарнира кисти, кг/м
угол 0,064 (соответствует 10 кг груза на расстоянии 80 мм от оси вращения кисти)
угол 0,194 (соответствует 10 кг груза на расстоянии 140 мм оси шарнира кисти)
Погрешность позиционирования, мм 1±00,25
Число одновременно управляемых 5
движений по степеням подвижности
Число каналов связи с внешним оборудованием:
выдача команд - 15 команд и 4 сопровождающих признака объектов
прием - 15 технологических ответных сигналов и 4 сопровождающих признака объектов,
прием сигналов условий выполнения программы 32
прием запросов программы от объектов управления 4
Контакты реле, коммутирующие выходные цепи 4±2,4 (24 4-3,6 0) В
на внешнее оборудование, обеспечивает
коммутацию токов до 0,2 А при напряжении
Ответные сигналы, поступающие от внешнего оборудования должны иметь следующие параметры: 4±2,4
напряжение (24 4-3,6 0)В
ток не менее 0,02А
Электрическое питание:
3-х фазная сеть переменного тока 4±10
напряжение, В 380 (4±15)
частота, Гц 50,7±0,1
потребляемая мощность, кВА 4
Давление питания сжатого воздуха, MПa 0,4-0,6
Расход сжатого воздуха, л/ч 100
Максимальные скорости перемещения звеньев манипулятора, град/с:
Перемещение звена I (поворот вокруг вертикальной оси) 90
Перемещение звена II (качание вертикального плеча) 90
Перемещение звена III (качание горизонтального плеча) 90
Перемещение звена IV (сгиб кисти) 90
Перемещение звена V (вращение кисти) 180
Масса, кг, не более 730
в т.ч. манипулятора 230
блока управления электроприводами 200
устройства числового программного управления 300