

24. Принципы качества управления тех.Процессом
Основными хар-ми качества систем упр-ния яв-ся: устойчи
вость систем при определен
ном диапазоне настроек и качество регулирования в переходном и установившемся режимах. При желании улучшить качество систем, как правило, приближают систему к границе устойчивости. Поэтому при анализе систем управления в первую очередь оценивают структурную устойчивость и область устойчивости при варьирова нии настроек.
Если система устойчива, она отрабатывает возмущения и всегда с определенной точностью возвращает регулируемый параметр на заданное заданием значение.
Рассмотрим геометрическую интерпретацию устойчивости системы (см. рис. 20). Шарик, находящийся в вогнутой поверхности подобен системе автоматического регулирова-ния. При действии возмущения шарик из невозмущенного состояния (точка А1) перемещается в возмущенное состояние (точка А 2).
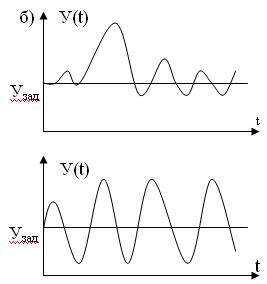

Рис. 20 - а) – геометрическая интеграция устойчивости системы автоматического регулирования; б) – переход-ные процессы соответственно устойчивой системы, соответ-ствующей вогнутой поверхнос-ти и неустойчивой системы, соответствующей выгнутой системы.
По определению Ляпунова система устойчива, если она от возмущенного состояния равновесия (точка А 2) перейдет в некоторую конечную область (точка А 3), окружающую невозмущенное состояние равновесие. Если разомкнем обратную связь системы регулирования, то выходная величина будет равна y(t) = x(t) . Wp . Wоб, причем передаточная функция разомкнутой системы будет Wp . Wоб (см. Рис. 21).
Передаточную
функцию разомкнутой системы можно
представить в виде
 ,
,
где
 – алгебраические
– алгебраические
полиномы от Р.
Условием устойчивости разомкнутой системы – является отрицательный знак вещественной части корней характеристического управления D(P) = 0.
Для замкнутой системы справедливо следующее равенство.
 Из
равенства находим передаточную функцию
замкнутой системы
Из
равенства находим передаточную функцию
замкнутой системы
Условием устойчивости замкнутой системы является отрицательный знак вещественной части всех корней характеристического уравнения D(р) + K(р) = 0.
Исследования устойчивости сводится таким образом, к определению знаков вещественной части корней характеристического уравнения, т.е. к вопросу распределения корней относительно мнимой оси в комплексной плоскости Р.
Существенным является поэтому выяснение правил, которые позволили бы минуя вычисления самих корней, ответить на вопрос, как распределены корни в комплексной полости относительно мнимой оси.
Правила, позволяющие определить расположение корней относительно мнимой оси, называются критериями устойчивости.
В настоящее время при решении вопроса об устойчивости используются алгебраические критерии: Рауса, Гурвица и частотные Михайлова, Найквиста.
Качество процессов управления.
Устойчивость САУ необходи-мое, но далеко недостаточное условие рационального выбора структуры и элементной базы системы.Для того, чтобы определить хорошо ли работает спроектированная система регулирования, прави-льно ли настроен регулятор, необходимы количественные критерии оценки качества процессов управления.
В теории управления принято оценивать качество процессов управления либо непосредст-венно по определенным из опыта или рассчитанным, кривым переходного процесса регулирования.
Прямые оценки качества систем – это оценки качества, полученные для кривой переходного процесса. Все остальные оценки качества называют косвенными.
Косвенные оценки качества связанны в основном с оценкой запасов устойчивости по амплитуде и по фазе.
![]()
Рассмотрим подробнее прямые оценки качества систем, которые используются в практике.
Оценка качества переход-ного процесса при возмущении вида ступенчатой функции.
Оценка качества установив-шихся процессов.
Оценками качества регулирования в переходном режиме являются: время переходного процесса Тп.п., и величина перерегулирования.


Рис. 20 - Переходные процессы в системе автоматического регулирования а) – переход-ный процесс вызванный изменением задания; б) – пере-ходный процесс, обусловлен-ный изменением нагрузки Q.
Условием для определения Тп.п. является окончание колебательных процессов в системе. Количественной оценкой окончания колебательных процессов принимается момент достижения параметром 5% отклонения от заданного заданием значения ∆m, либо величины ошибки в установившемся режиме.
Изменение величины ∆m существенно влияет на Тп.п. Время снятия переходной характеристики при ∆m = 5% должно быть не менее трех постоянных времени объекта управления.
Величина перерегулирования σ определяется следующим выражением
 ,
где ymax
– максимальное отклонение регулируемой
величины от задания (см. Рис.26).
,
где ymax
– максимальное отклонение регулируемой
величины от задания (см. Рис.26).
Обычно считается система удовлетворительной по динамическим характеристикам если σ < 25%.
Оценка качества системы регулирования в установившемся режиме определяется:
Ошибкой, вызванной нечувствитель-ностью регулятора, люфтами в исполнительных механизмах, погрешностью датчиков и т.д.
Ошибкой, вызван-ной статизмом системы.
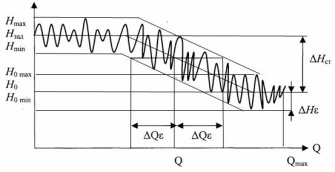
Рис. 27 - График изменения статической ошибки в зависимости от изменения нагрузки, например, изменения отбора пара в регуляторе уровня И.И. Ползунова
Статическая ошибка характерна для регуляторов прямого действия и других в основном пропорциональных регуляторах, в которых отсутствует интегральная составляющая.
Таким образом, в статических регуляторах максимальная ошибка регулирования равна (см. рис. 27)
г де
Нзад
– задание регулятора, Н0
– среднее установившееся значение
уровня,
де
Нзад
– задание регулятора, Н0
– среднее установившееся значение
уровня,
 Нε
–величина нечувствительности регулятора.
Нε
–величина нечувствительности регулятора.
Первое слагаемое является статической ошибкой, а второе вызванное нечувствитель-ностью регулятора.