

Способы организации каналов аналогового ввода (коммутация аналоговых и цифровых сигналов).
Обеспечение отказоустойчивости scada системы WinCc.
При обеспечении резервирования используется пара серверов: основной и вторичный (больше серверов быть не может).
В структуре присутствует коллектив рабочих станций, набор серверов, далее включается ПЛК.
Особенности: сервера имеют одинаковые SCADA-системы, чья работа синхронизирована, то есть сервера регулярно обмениваются по Ethernet специальным пакетом, подтверждая работу. В том случае если один из серверов отказывает, его функции перенимает другой сервер. В работоспособном состоянии управление группой ПЛК осуществляется основным сервером.
Резервный
Second лишь повторяет входные данные в
своей памяти и симулирует выработку
управляющего воздействия. 31
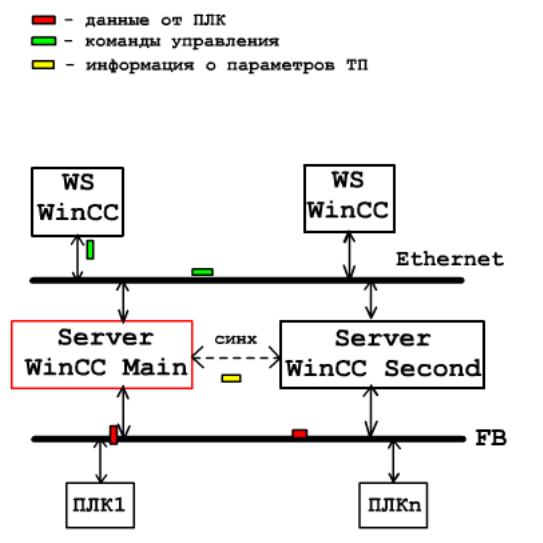
Рисунок 6 – Горячее резервирование серверов WinCC
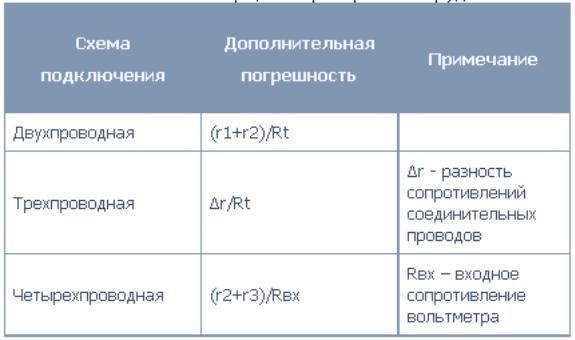
Рисунок 15 - Свойства различных способов подключения датчиков.
Клиент серверная архитектура scada системы WinCc. 30
Рисунок 5 – Клиент-серверный вариант использования WinCC
Данный режим использования SCADA-систем предполагает наличие сервера (серверов). Сервер WinCC содержит ту часть SCADA-систем, которая не требует работы оператора. Сервер не оснащается графическим интерфейсом. Кроме группы серверов, существует группа рабочих станций, предназначенных для работы нескольких операторов.
Сервер WinCC с одной стороны коммутируется с рабочими станциями, как правило, с интерфейсами Ethernet, с другой стороны – через полевую шину с группой ПЛК.
Сервера WinCC содержат различные SCADA-системы, на каждой из которых возложены собственные задачи.
Уровни стандартизации модулей систем управления. 6
Для обеспечения простоты интеграции модулей в модульные системы управления осуществляется регламентация их характеристик на следующих уровнях:
1) Конструктивный уровень. На этом уровне стандартизации подвержены механические, тепловые, энергетические характеристики блоков, а также системы охлаждения.
Пример: Технологии COTS, ROTS, MOTS.
Отличия: COTS (commercial off-the-shelf) – коммерческие модули, готовые к применению.
ROTS (rugged off-the-shelf) – расширенные модули, готовые к применению.
MOTS (military off-the-shelf) – военные модули, готовые к применению.
Стандарты «евромеханика».
2) Уровень интерфейсов определяет, какие интерфейсы, режимы, протоколы используются при создании модульных систем управления.
Пример: VME-Bus, Compact-PCI
3) Функциональный уровень. На этом уровне стандартизируются исполняемые модулями модульной системы управления функции.
Пример: АЦП, ЦАП, контроллеры интерфейса, сопроцессор.
4) Программный уровень. Стандартизация используемого ПО в виде модулей. Как правило, программные модули в составе ИУС используются готовые разработанные третьей стороной в процессе аутсорсинга.
5. Модели жизненного цикла аппаратуры. Прототипирование.
Жизненный цикл системы — период времени, который начинается с момента принятия решения о необходимости создания системы и заканчивается в момент ее полного изъятия из эксплуатации.
Учет этапов жизненного цикла позволяет уменьшить издержки на доработку изделия и спланировать деятельность по созданию и обслуживанию системы.
Существует два типа моделей жизненного цикла:
1) Последовательностный;
2) Циклический (с прототипированием)