

Виды колебаний
Свободные колебания совершаются под действием внутренних сил системы после того, как система была выведена из положения равновесия. Чтобы свободные колебания были гармоническими, необходимо, чтобы колебательная система была линейной (описывалась линейными уравнениями движения), и в ней отсутствовала диссипация энергии (последняя вызвала бы затухание).
Вынужденные колебания совершаются под воздействием внешней периодической силы. Чтобы они были гармоническими, достаточно чтобы колебательная система была линейной (описывалась линейными уравнениями движения), а внешняя сила сама менялась со временем как гармоническое колебание (т.е. чтобы зависимость от времени этой силы была синусоидальной).
Динамика гармонических колебаний. Гармонические осцилляторы: пружинный, математический и физический маятники.
6. Динамика гармонических колебаний
Механические гармонические колебания
Пусть материальная точка совершает прямолинейные гармонические колебания вдоль оси координат х около положения равновесия, принятого за начало координат. Тогда зависимость координаты х от времени t задается уравнением, аналогичным уравнению (140.1), где s=x:
х=Аcos(ω0t+φ). (141.1)
Согласно выражениям (140.4) и (140.5), скорость v и ускорение а колеблющейся точки соответственно равны
Сила F=ma, действующая на колеблющуюся материальную точку массой т, с учетом (141.1) и (141.2) равна
F= -mω20x.
Следовательно, сила пропорциональна смещению материальной точки из положения равновесия и направлена в противоположную сторону (к положению равновесия).
Кинетическая энергия материальной точки, совершающей прямолинейные гармонические колебания, равна
Потенциальная энергия материальной точки, совершающей гармонические колебания под действием упругой силы F, равна
Сложив
(141.3) и (141.5), получим формулу для полной
энергии:![]()
Полная энергия остается постоянной, так как при гармонических колебаниях справедлив закон сохранения механической энергии, поскольку упругая сила консервативна.
Из формул (141.4) и (141.6) следует, что Т и П изменяются с частотой 2ω0, т. е. с частотой, которая в два раза превышает частоту гармонического колебания.
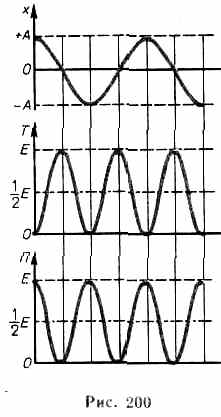
На рис. 200 представлены графики зависимости х, Т и П от времени. Так как <sin2α>= <cos2aα>=1/2, то из формул (141.3), (141.5) и (141.7) следует, что <Т> = <П>=1/2E.
17. Гармонический осциллятор.
Гармоническим
осциллятором называется система,
совершающая колебания, описываемые
уравнением вида (140.6):![]()
Колебания гармонического осциллятора являются важным примером периодического движения и служат точной или приближенной моделью во многих задачах классической и квантовой физики. Примерами гармонического осциллятора являются пружинный, физический и математический маятники, колебательный контур (для токов и напряжений столь малых, что элементы контура можно было бы считать линейными; см. §146).
Гармонический
осциллятор (в классической
механике) —
это система,
которая при смещении из положения
равновесияиспытывает
действие возвращающей силы ![]() ,
пропорциональной смещению
,
пропорциональной смещению ![]() (согласно закону
Гука):
(согласно закону
Гука):
![]()
где k — положительная константа, описывающая жёсткость системы.
1. Пружинный маятник — это груз массой т, подвешенный на абсолютно упругой пружине и совершающий гармонические колебания под действием упругой силы F = –kx, где k — жесткость пружины. Уравнение движения маятника
![]()
Из
выражений (142.1) и (140.1) следует, что
пружинный маятник совершает гармонические
колебания по закону х=А соs (w0t + j)
с циклической частотой![]() (142.2)
(142.2)
и
периодом![]() (142.3)
(142.3)
Формула (142.3) справедлива для упругих колебаний в пределах, в которых выполняется закон Гука (см. (21.3)), т. е. когда масса пружины мала по сравнению с массой тела. Потенциальная энергия пружинного маятника, согласно (141.5) и (142.2), равна
![]()
2. Физический маятник — это твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной горизонтальной оси, проходящей через точку О, не совпадающую с центром масс С тела (рис. 201).

Если маятник отклонен из положения равновесия на некоторый угол a, то в соответствии с уравнением динамики вращательного движения твердого тела (18.3) момент M возвращающей силы можно записать в виде
![]() (142.4)
(142.4)
где J — момент инерции маятника относительно оси, проходящей через точку подвеса О, l – расстояние между ней и центром масс маятника, Ft= –mg sina »–mga. — возвращающая сила (знак минус обусловлен тем, что направления Ft и a всегда противоположны; sina »a соответствует малым колебаниям маятника, т.е. малым отклонениям маятника из положения равновесия). Уравнение (142.4) можно записать в виде
![]()
Принимая
![]() (142.5)
(142.5)
получим уравнение
![]()
идентичное с (142.1), решение которого (140.1) известно:
![]() (142.6)
(142.6)
Из выражения (142.6) следует, что при малых колебаниях физический маятник совершает гармонические колебания с циклической частотой w0 (см. (142.5)) и периодом
![]() (142.7)
(142.7)
где L=J/(ml) — приведенная длина физического маятника.
Точка О' на продолжении прямой ОС, отстоящая от точки О подвеса маятника на расстоянии приведенной длины L, называется центром качаний физического маятника (рис. 201). Применяя теорему Штейнера (16.1), получим
![]()
т. е. ОО' всегда больше ОС. Точка подвеса О маятника и центр качаний О' обладают свойством взаимозаменяемости: если точку подвеса перенести в центр качаний, то прежняя точка О подвеса
станет новым центром качаний, и период колебаний физического маятника не изменится.
3.
Математический маятник —
это идеализированная система,
состоящая из материальной точки
массой т, подвешенной
на нерастяжимой невесомой нити, и
колеблющаяся под действием силы тяжести.
Хорошим приближением математического
маятника является небольшой тяжелый
шарик, подвешенный на тонкой длинной
нити. Момент инерции математического
маятника![]() (142.8)
(142.8)
где l — длина маятника.
Так
как математический маятник можно
представить как частный
случай физического маятника, предположив,
что вся его масса сосредоточена в одной
точке — центре масс, то, подставив
выражение (142.8) в формулу (1417), получим
выражение для периода малых колебаний
математического маятника![]() (142.9)
(142.9)
Сравнивая формулы (142.7) и (142.9), видим, что если приведенная длина L физического маятника равна длине l математического маятника, то периоды колебаний этих маятников одинаковы. Следовательно, приведенная длина физического маятника — это длина такого математического маятника, период колебаний которого совпадает с периодом колебаний данного физического маятника.
Энергия гармонического осциллятора.
Кинетическая энергия K системы в функции времени t такова:
![]()
и потенциальная энергия есть
![]()
Полная механическая энергия системы, однако, имеет постоянное значение
![]()
или
Кинетическая энергия:
![]()
Потенциальная энергия:
![]()
Учитывая
то, что
![]() т.е.,
т.е.,
![]() последнее выражение можно записать в
виде:
последнее выражение можно записать в
виде:
![]()
Полная энергия колеблющегося тела равна сумме кинетической и потенциальной энергий
![]()
Связь между угловыми и линейными скоростями и ускорениями.
Так как dr/dt=v и d(фи)/dt=w, то v=[d(фи)/dt, r]=[w,r](1),т.е. линейная скорость v точки твердого тела, вращающегося вокруг неподвижной оси, равна векторному произведению угловой скорости w на радиус-
вектор r точки. Модуль вектора равен v = wr sin(тэтта) или v = w R , где R = r sin(тэтта) – радиус окружности, по которой движется точка. Направление вектора v совпадает с направлением поступательного движения буравчика (правило правого винта) при его вращении от w к r .
Если мы продифференцируем ур-ние (1) по времени, то найдём полное ускорение точки:
a=[dw/dt,r]+[w,dr/dt]=[(бетта),r]+[w,v]= [(бетта),r]+[w,[w,r]].
При равноускоренном вращательном движении (бетта) = const) можно показать, что модуль полного ускорения точки есть величина a=rad(a2t+a2n), где все векторы a , at и an лежат в плоскости, перпендикулярной оси вращения. В этом случае справедливы формулы:
an =v2/R=w2R, at =dv/dt=d(wR)/dt=R*(бетта), s=t2&t1vdt=t2&t1wRdt=R t2&t1d(фи)/dt*dt=R(фи)
где s –длина пути, пройденного точкой по дуге окружности радиуса R; (фи) – угол поворота за промежуток времени (t2-t1 ).
Сложение гармонических колебаний одного направления и взаимно перпендикулярных колебаний.
Сложение взаимно перпендикулярных колебаний.
Рассмотрим две взаимно перпендикулярные векторные величины x и y , изменяющиеся со временем с одинаковой частотой ω по гармоническому закону:
![]()
![]() (1)
(1)
Где e x и e у — орты координатных осей x и y, А и B — амплитуды колебаний. Величинами x и у может быть, например, смещения материальной точки (частицы) из положения равновесия.
В случае колеблющейся частицы величины x и y можно представить в виде:
![]() ,
,
![]() (2)
(2)
Они определяют координаты частицы на плоскости xy.
Выражения (2) представляют собой заданное в параметрической форме уравнение траектории, по которой будет двигаться частица. Вид траектории зависит от разности фаз обоих колебаний.
Исключив
из уравнений (2) параметр t,
получим уравнение траектории в обычном
виде. Из
первого уравнения: ![]() (3).
Соответственно
(3).
Соответственно ![]() (4)
(4)
По формуле для косинуса суммы:
![]() ,
тогда
,
тогда
![]()
![]()
Преобразуем это уравнение
![]()
![]()
![]()
![]() (5)
(5)
Получили уравнение эллипса, оси которого повернуты относительно координатных осей х и у.Ориентация эллипса и его полуоси зависят довольно сложным образом от амплитуд A и В и разности фаз α .
Сложение колебаниё одного направления и одинаковой частоты.
Рассмотрим
сложение двух гармонических
колебаний х 1 и x 2 одного
направления и одинаковой частоты:![]() ,
, ![]() (1)
(1)
Оба колебания представим с помощью векторов A 1 и А 2 . Используя правила сложения векторов можно найти результирующий вектор А, представляющий собой сумму двух векторов A 1 и А 2 .
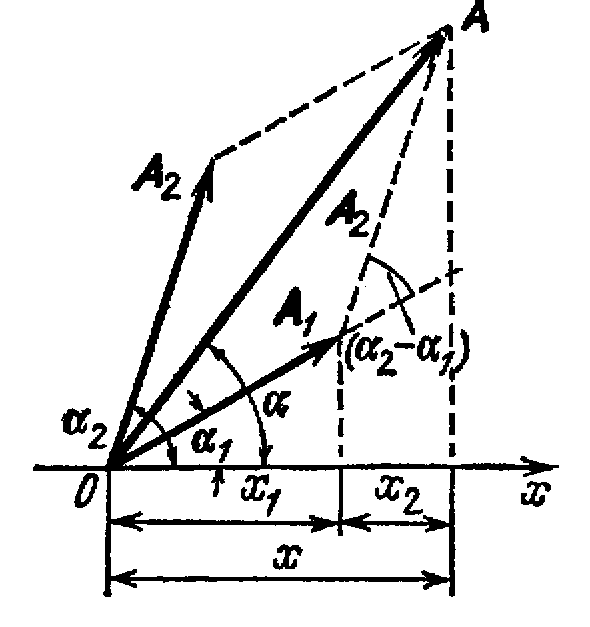 Вектор A представляет
собой результирующее колебание, потому
что из рисунка видно, что проекция этого
вектора на ось x равна сумме проекций
складываемых векторов:
Вектор A представляет
собой результирующее колебание, потому
что из рисунка видно, что проекция этого
вектора на ось x равна сумме проекций
складываемых векторов:![]()
Вектор A вращается с той же угловой скоростью ω 0 , как и векторы А 1 и А 2 , так что сумма x 1 и х 2является гармоническим колебанием с частотой (ω 0 , амплитудой A и начальной фазой α . Используя теорему косинусов получаем, что
![]() (2)
(2)
![]() (3)
(3)
Замена сложения функций сложением векторов, которая возможна при Представление гармонических колебаний с помощью векторов, значительно упрощает вычисления.
Уравнение затухающих колебаний и его решение. Коэффициент затухания. Логарифмический декремент затухания.
Затухающие
колебания —
колебания, энергия которых уменьшается
с течением времени. Бесконечно длящийся
процесс вида ![]() в
природе невозможен. Свободные колебания
любого осциллятора рано или поздно
затухают и прекращаются. Поэтому на
практике обычно имеют дело с затухающими
колебаниями. Они характеризуются тем,
что амплитуда колебаний A является
убывающей функцией. Обычно затухание
происходит под действием сил сопротивления
среды, наиболее часто выражаемых
линейной зависимостью от скорости
колебаний
в
природе невозможен. Свободные колебания
любого осциллятора рано или поздно
затухают и прекращаются. Поэтому на
практике обычно имеют дело с затухающими
колебаниями. Они характеризуются тем,
что амплитуда колебаний A является
убывающей функцией. Обычно затухание
происходит под действием сил сопротивления
среды, наиболее часто выражаемых
линейной зависимостью от скорости
колебаний ![]() или
её квадрата.
или
её квадрата.
В акустике: затухание — уменьшение уровня сигнала до полной неслышимости.
Пускай имеется система, состоящая из пружины(подчиняющейся закону Гука), один конец которой жёстко закреплён, а на другом находится тело массой m. Колебания совершаются в среде, где сила сопротивления пропорциональна скорости с коэффициентом c (см. вязкое трение).
Тогда второй закон Ньютона для рассматриваемой системы запишется так:
![]()
где Fc — сила сопротивления, Fy — сила упругости
Fc = − cv, Fy = − kx, то есть
ma + cv + kx = 0
или в дифференциальной форме
![]()
где k — коэффициент упругости в законе Гука, c — коэффициент сопротивления, устанавливающий соотношение между скоростью движения грузика и возникающей при этом силой сопротивления.
Для
упрощения вводятся следующие
обозначения: ![]()
Величину ω называют собственной частотой системы, ζ — коэффициентом затухания.
Тогда дифференциальное уравнение принимает вид
![]()
Сделав замену x = eλt, получают характеристическое уравнение
![]()
Корни которого вычисляются по следующей формуле
![]()