

14. Конструктивно-функциональная классификация механизмов.
Существует 5 осн. видов мех.: рычажные, кулачковые, фрикционные, зубчатые и мех. с гибкими звеньями.
Рычажные:
их звенья обр. только вращ., поступ.,
цилиндр. и сферические пары.
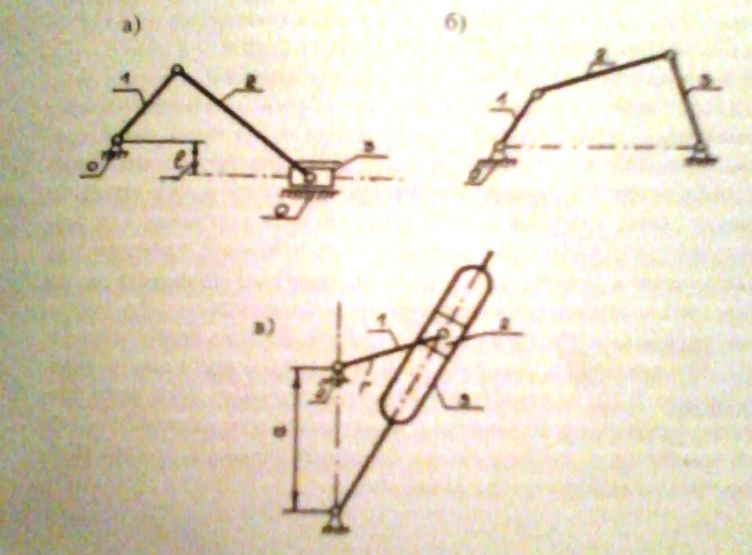
Кривошип 1- вращ. звено, кт может совершать полный оборот вокруг неподвижной оси. Шатун 2- звено, обр. кинемат. пары только с подвиж. звеньями. Ползун 3(рис. А) –звено, образ. поступ. пару со стойкой. Коромысло 3 (рис. Б) – вращ. звено, сов. только неполный оборот неподв. оси. Кулиса 3(рис. В)- звено, вращ. вокруг неподв. оси и образ. с др. подвижным звеном поступательную пару.
Кулачковые: мех. с кулачком. Кулачок – звено, им. элемент высшей пары в виде поверхности переменной кривизны. Предназначены для преобраз вращ. или вращ-пост. движ. кулачка в возвратно-вращ. или возвр.-пост. движ. толкателя.
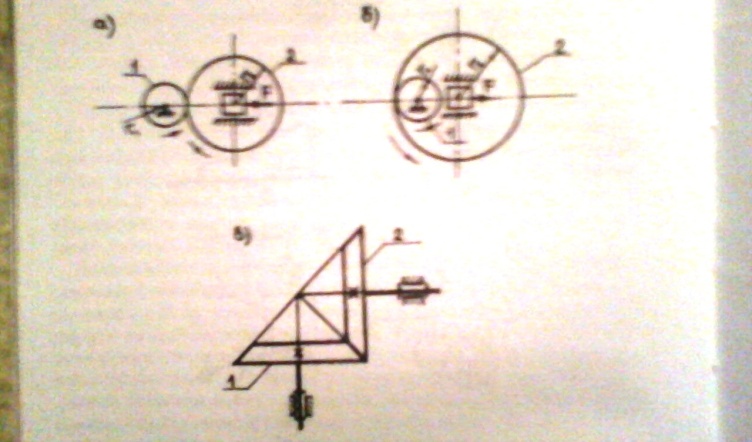
Фрикцинные:
движ. от входного зв. к выходному перед.
за счёт сил трения в местах контакта
звеньев. Фрикционная передача с парал.
(рис. А, б) или пересекающимися
о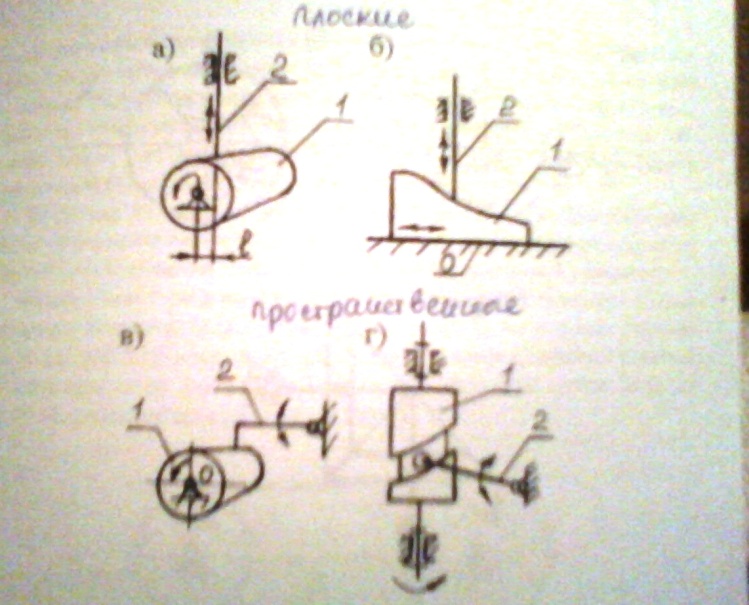 сями(рис.в).
сями(рис.в).
Зубчатые: в составе зубчатые звенья. Зуб. звено- зв, им. звенья для передачи движ. посредством взаим. с выступами др звена. Зуб зацепление – высшая пара.
С
гибкими связями:
прим. для передачи вращ движ между
валами при больших межосевых расстояниях.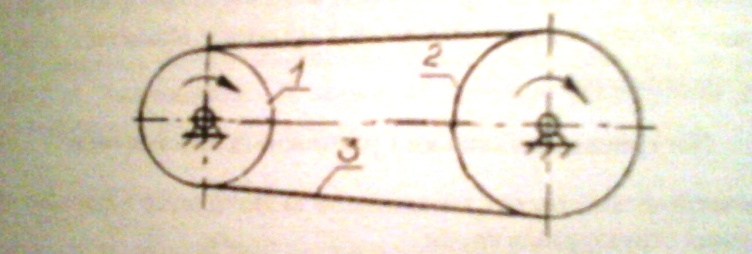
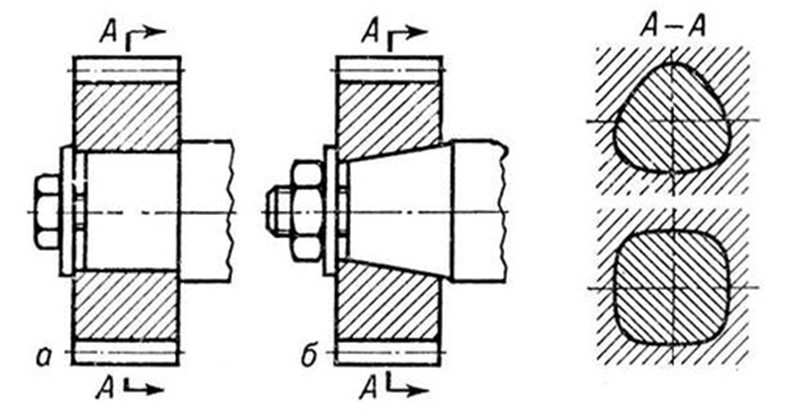
15. Профильные соединения.
Профильные
соединения прим для передачи вращ М от
вала к ступице. В профильных соединениях
контакт вала и ступицы осущ по некруглой
поверхности. Проф соед имеют в поперечном
к оси соединения сечении плавный
некруглый профиль поверхности контакта
вала и ступицы. Чаще прим равноосные
соед треуг профиля. Прим-ый профиль
обладает св-ом равноосности – постоянством
диаметрального размера. Проф соед в
осевом направлении могут быть
цилиндрическими или коническими
(фасонно-проф соед-ия: а — по цилиндр
пов, б — по конич пов.).
Достоинства профильных соединений: 1) отсутствие концентраторов напряжений кручения; 2) хорошее центрирование деталей соед; 3) повышенная надежность по критерию прочности соед по сравнению с соединениями с натягом.
профильных соединений: 1) сложность изготовления проф пов; 2) при передаче соед-ями вращ М возникают знач распорные силы, деформирующие ступицы.
16. Определение равнодействующей системы сходящихся сил методом проекций
Величина равнодействующей равна векторной (геометрической) сумме векторов системы сил. Определяем равнодействующую геометрическим способом. Выберем систему координат, определим проекции всех заданных векторов на эти оси (рис. 3.4а). Складываем проекции всех векторов на оси х и у (рис. 3.46).
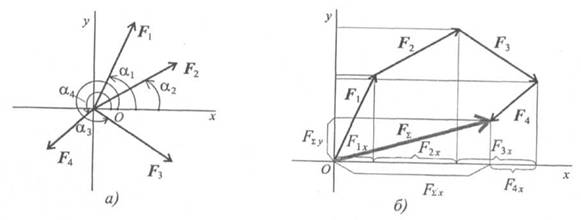
Рис.3.4
FΣч = Flx + F2x + F3x + F4x; FΣн = Fly + F2y + F3y + F4y;
![]() ;
; ![]() .
.
Модуль (величину) равнодействующей можно найти по известным проекциям:
![]() .
.
Направление вектора равнодействующей можно определить по величинам и знакам косинусов углов, образуемых равнодействующей с осями координат (рис. 3.5). Растяжение сжатиеПродольные силы и определение напряжений.
-
 ;
; 
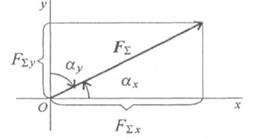
Рис.3.5
Условия равновесия плоской системы сходящихся сил в аналитической форме
Исходя из того, что равнодействующая равна нулю, получим:
![]()
FΣ = 0.
Условия равновесия в аналитической форме можно сформулировать следующим образом:
Плоская система сходящихся сил находится в равновесии, если алгебраическая сумма проекций всех сил системы на любую ось равна нулю.
Система уравнений равновесия плоской сходящейся системы сил:
![]() .
.
В задачах координатные оси выбирают так, чтобы решение было наиболее простым.