

10. Метод Гаусса решения слу:
Суть метода Гаусса заключается в
последовательном исключении неизвестных и состоит из двух этапов.
Прямой метод Гаусса (пошагово):
Выбирается одно из уравнений (оно объявляется ведущим). В этом уравнении выбирается ведущая переменная, в качестве которой может быть выбрана любая переменная с ненулевым коэффициентом.
С помощью равносильных преобразований эта переменная исключается из других уравнений системы.
Выбирается другое уравнение, которое объявляется следующим ведущим и т.д..
З амечание
8.3. В ходе описанных преобразований
можно получить систему, которой будет
соответствовать расширенная матрица,
содержащая нулевую строку. Наличие
такой строки означает, что одно уравнение
в исходной системе является линейной
комбинацией остальных. Дальнейшие
преобразования системы следует
производить без данного уравнения
(соответственно, без нулевой строки).
амечание
8.3. В ходе описанных преобразований
можно получить систему, которой будет
соответствовать расширенная матрица,
содержащая нулевую строку. Наличие
такой строки означает, что одно уравнение
в исходной системе является линейной
комбинацией остальных. Дальнейшие
преобразования системы следует
производить без данного уравнения
(соответственно, без нулевой строки).
Замечание 8.4 На некотором этапе преобразований может быть полученарасширенная матрица следующего вида
В ыделенной
строке этой матрицы соответствует
уравнение
ыделенной
строке этой матрицы соответствует
уравнение
 ,
которому не удовлетворяет ни один набор
чисел. Следовательно, система, в данном
случае, несовместна.
,
которому не удовлетворяет ни один набор
чисел. Следовательно, система, в данном
случае, несовместна.
Обратный ход метода Гаусса:
Последовательно, (начиная с последней) исключаются ведущие переменные (в записанной матрице им соответствуют единичные коэффициенты) из расположенных выше уравнений.
В результате всех преобразований (при условии совместности), будет получена система со следующей расширенной матрицей:
 (8.1)
(8.1)
Определение 8.3: Переменные x1, x2, …, xm в системе (8.1) называются базисными, а хm+1,…, xn – свободными.
Замечание 8.4: Если в (8.1) m = n , то исходная система имеет одно решение (в этом случае свободные переменные отсутствуют)..
З амечание
8.5: если в (8.1) n>m,
то исходная система имеет бесчисленное
множество решений, которые принято
записывать в виде:
амечание
8.5: если в (8.1) n>m,
то исходная система имеет бесчисленное
множество решений, которые принято
записывать в виде:
(8.2)
Придавая свободным переменным произвольные значения, можно получить, в соответствии с (8.2), всевозможные наборы чисел (x1, x2, … , xn), удовлетворяющих исходной системе.
Пример 1. Решить систему линейных уравнений
x1 + 2x2 + 5x3 = -9,
x1 - x2 + 3x3 = 2,
3x1 - 6x2 - x3 = 25.
Составим расширенную матрицу коэффициентов этой системы и с помощью элементарных преобразований приведем к ступенчатому виду:

Мы приходим, следовательно, к системе уравнений
x1 + 2x2 + 5x3 = -9,
-3x2 - 2x3 = 11,
-8x3 = 8.
Система совместна и обладает единственным решением, т.е. определена. Находим решение полученной системы, начиная с последнего уравнения
x1 = 2, x2 = -3, x3 = -1.
Основные понятия:
Система m линейных уравнений с n неизвестными (или, линейная система) в линейной алгебре — это система уравнений вида
|
(1) |
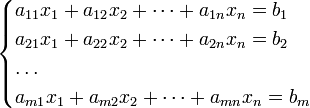
Здесь x1, x2, …, xn — неизвестные, которые надо определить. a11, a12, …, amn — коэффициенты системы — и b1, b2, … bm — свободные члены — предполагаются известными. Индексы коэффициентов (aij) системы обозначают номера уравнения (i) и неизвестного (j), при котором стоит этот коэффициент, соответственно.
Система (1) называется однородной, если все её свободные члены равны нулю (b1 = b2 = … = bm = 0), иначе — неоднородной.
Система (1) называется квадратной, если число m уравнений равно числу n неизвестных.
Решение системы (1) — совокупность n чисел c1, c2, …, cn, таких что подстановка каждого ci вместо xi в систему (1) обращает все её уравнения в тождества.
Система (1) называется совместной, если она имеет хотя бы одно решение, и несовместной, если у неё нет ни одного решения.
Совместная система вида (1) может иметь одно или более решений.
Решения c1(1), c2(1), …, cn(1) и c1(2), c2(2), …, cn(2) совместной системы вида (1) называются различными, если нарушается хотя бы одно из равенств:
c1(1) = c1(2), c2(1) = c2(2), …, cn(1) = cn(2). |
Совместная система вида (1) называется определённой, если она имеет единственное решение; если же у неё есть хотя бы два различных решения, то она называется неопределённой. Если уравнений больше, чем неизвестных, она называется переопределённой.
Векторная алгебра: основные понятия векторов, линейные операции над векторами и их св-ва, координатное выражение. Скалярное, векторное, смешанное произведения векторов: определение, св-ва, координатное выражение, приложения.
Векторы, основные понятие и определения:
Величины, встречающиеся в физике, механике и других науках, можно разделить на 2 категории: скалярные (определяются числом) и векторные (определяются числовым значением и направлением). Вектораминаз-ся направленные отрезки. А – начало В – конецДлина вектора наз-ся его модулем.Вектор, начало и конец которого совпадают, наз-сянулевым.
Векторы, равные по модулю, параллельные, но направленные в противоположную сторону, наз-сяпротиволежащими.
Векторы, лежащие на одной или параллельных прямых, наз-сяколлинеарными.
Векторы а, в, с наз-сякомпланарными, если они лежат в одной плоскости или находятся в параллельных плоскостях.
Векторы наз-сяравными, если они имеют одинаковую длину и одинаковое направление.
Векторы, длина которых равна 1, наз-ся единичными векторами.
Свойства линейных операций над векторами:





