

Тема 7. Магнитоуправляемые элементы.
Магнитоуправляемые логические микросхемы, используются в устройствах самого разнообразного назначения. В настоящее время наиболее широкое распространение получили универсальные магнитные датчики положения и перемещения. Конструкция датчиков может быть различной, но они всегда содержат преобразователь магнитного поля и магнитную систему, разомкнутую или замкнутую. Магнитная система может быть составной частью датчика, а может включать в себя и те или иные элементы контролируемого объекта.
Простейший датчик состоит из магнитоуправляемой микросхемы (МУМС) и постоянного магнита, укрепленного на подвижном звене контролируемого объекта. При сближении магнита и МУМС на некоторое расстояние индукция магнитного поля становится достаточной для срабатывания микросхемы. Удаление магнита приводит к ее переключению в исходное состояние.
При разработке датчиков учитывают известные закономерности действия магнитного поля, характеристики постоянных магнитов, а также влияние элементов конструкции на параметры датчиков.
Магнитные датчики применяют в бесконтактной клавиатуре, вентильных электродвигателях, автоматических устройствах защиты сети, электронных реле и предохранителях, измерителях частоты и направления вращения вала, преобразователях угла поворота, системах промышленной, автомобильной и бытовой автоматики, автостопах магнитофонов и электропроигрывателей и т. д. Подобные датчики с вращающейся цилиндрической шторкой используются в бесконтактных прерывателях электронной системы зажигания автомобилей. Такой прерыватель имеет высокую надежность работы и долговечность.
Если на шторке расположить несколько рядов окон в порядке, соответствующему коду Грея, то с использованием соответствующего числа МУМС и магнитов можно реализовать 5—8 разрядный датчик линейного перемещения или датчика «частота вращения—код». В отличие от светового датчика магнитный не требует сложной оптической системы, более надежен и экономичен.
На базе магнитного датчика могут быть выполнены интересные электромеханические замковые устройства. На цилиндрической личине замка укрепляют магнит, так чтобы при ее повороте ключом магнит приблизился к укрепленной рядом МУМС. Электронный узел, воспринимающий сигнал от микросхемы, выполняет необходимые переключения. Автомобильные замки зажигания, работающие на таком принципе, отличаются удобством и высокой надежностью.
Основные преимущества магнитоуправляемых микросхем по сравнению с другими преобразователями физических (неэлектрических) величин простота обеспечения практически идеальных механической, электрической, тепловой и других видов развязки измерительных и управляющих цепей от объектов контроля, а также большой динамический диапазон и возможность непосредственного сопряжения со стандартными логическими узлами.
Выпускаемые промышленностью интегральные логические микросхемы К1116КП1, К1116КП2, К1116КПЗ, К1116КП4, К1116КП7, К1116КП8, К1116КП9 и К1116КП10 представляют собой электронные ключи, управляемые магнитным полем.
Микросхемы этой серии представляют собой устройства малой степени интеграции, содержащие в одном кремниевом кристалле преобразователь магнитного поля и электронное устройство усиления и обработки сигнала. Преобразователем магнитного поля служит интегральный 4-электродный элемент Холла, принцип действия которого основан на возникновении на двух продольных электродах ЭДС, прямо пропорциональной произведению напряженности магнитного поля на ток, протекающий через поперечные электроды. Микросхемы изготовляют по эпипланарной технологии и оформляют в 3-х 5- выводном пластмассовом корпусе с жесткими плоскими выводами. Внешний вид и чертежи корпуса показаны на рисунке.
Штрих-пунктирным квадратом на чертежах обозначено размещение зоны чувствительности элемента Холла (размеры зоны у микросхем К1116КП9 и К1116КП10— 1,5Х 1,5 мм). По реакции на воздействие внешнего магнитного поля микросхемы подразделяют на униполярные, уровень напряжения на выходе которых зависит от значения индукции магнитного поля одной полярности, и биполярные, уровень выходного напряжения которых зависит как от значения индукции, так и от знака (полярности) воздействующего магнитного поля.
Униполярные микросхемы К1116КП1,К1116КПЗ, К1116КП9, К1116КП10 имеют прямой выход, сигнал на котором в отсутствие магнитного поля соответствует уровню логической 1. При повышении индукции внешнего магнитного поля до значения В>ВСРАБ, происходит переключение микросхемы и уровень сигнала на ее выходе скачком изменяется до логического нуля. Униполярная микросхема К1116КП2 имеет инверсный выход, на котором уровень логической 1 появляется при воз действии магнитного поля с индукцией. С повышением температуры униполярных микросхем происходит увеличение значения индукции срабатывания / отпускания. С повышением температуры биполярных микросхем индукция срабатывания отпускания уменьшается. Температурный коэффициент изменения индукции срабатывания и отпускания лежит в пределах от 0,01 до 0,05 мТл/°С в зависимости от типа микросхемы. Повышенная помехоустойчивость микросхем обеспечена наличием гистерезиса (с индукцией 3 9 мТл) на характеристике переключения.
М икросхемы
серии К 1116 рассчитаны на сопряжение с
цифровыми интегральными микросхемами
видов РТЛ, ДТЛ, ТТЛ, ЭСЛ, ТЛ^Л и структуры
КМОП. Одна из возможных схем сопряжения
показана на рисунке. Минимальное
сопротивление в омах резистора R1
определяют по формуле R1MIN>UКОМ / I 0ВЫХ MAXгде UКОМ —
напряжение коммутации
В, I 0ВЫХ MAX —максимальный
выходной ток низкого уровня. Микросхемы
К1116КП1 и К1116КП2 имеют по два синфазных
выхода с открытым коллектором и
стробирующий вход (вывод 3) При подаче
на этот вход стробирующего импульса с
уровнем 0, уровень выходного напряжения
не будет зависеть от воздействия внешнего
магнитного поля, т. е. будет реализована
функция «запрет» Если вход стробирования
не используют, его необходимо подключить
к плюсовому проводу питания.
икросхемы
серии К 1116 рассчитаны на сопряжение с
цифровыми интегральными микросхемами
видов РТЛ, ДТЛ, ТТЛ, ЭСЛ, ТЛ^Л и структуры
КМОП. Одна из возможных схем сопряжения
показана на рисунке. Минимальное
сопротивление в омах резистора R1
определяют по формуле R1MIN>UКОМ / I 0ВЫХ MAXгде UКОМ —
напряжение коммутации
В, I 0ВЫХ MAX —максимальный
выходной ток низкого уровня. Микросхемы
К1116КП1 и К1116КП2 имеют по два синфазных
выхода с открытым коллектором и
стробирующий вход (вывод 3) При подаче
на этот вход стробирующего импульса с
уровнем 0, уровень выходного напряжения
не будет зависеть от воздействия внешнего
магнитного поля, т. е. будет реализована
функция «запрет» Если вход стробирования
не используют, его необходимо подключить
к плюсовому проводу питания.
Датчик Холла
Принцип действия датчиков основан на эффекте Холла. Основные преимущества этих датчиков заключается в отсутствии механических движущихся частей и высоком быстродействии (до 100 кГц). Благодаря этому датчики Холла отличаются высокой надежностью, долговечностью и не требуют физического контакта с измеряемой средой.
Датчики Холла широко используются там, где требуются высокая точность и надежность. Они находят применение в безколлекторных двигателях, измерителях различных величин, сварочном оборудовании, бытовых приборах, компьютерах и т.д.
Эффект Холла заключается в возникновении напряжения в проводнике с током в магнитном поле. Возникающее напряжение перпендикулярно протекающему току и пропорционально магнитному потоку. После усиления это напряжение используется для управления выходными каскадами датчиков и внешними схемами.
Выходные каскады датчиков могут быть различных типов - аналоговые, когда выходной сигнал пропорционален магнитному потоку через датчик, и цифровые, имеющие два уровня сигнала на выходе. Аналоговые каскады могут быть выполнены по схеме "открытый коллектор" (NPN) и "источник тока" (PNP). По реакции на магнитное поле датчики распределяются по трем группам: биполярные, однополярные и униполярные. Для включения биполярного датчика требуется воздействие поля положительной полярности, а для выключения - отрицательной. Однополярные датчики измеряют поля любой полярности, а униполярные - только одной (обычно положительной).
Магнитное поле может быть сформировано постоянными магнитами или электромагнитами. Изменение напряженности поля достигается путем перемещения магнита, изменения тока электромагнита или внесением магнитного материала в зазор между датчиком и магнитом. Выпускаются датчики, в которых используются внешние или встроенные в корпус магниты. В последнее время в выходные каскады датчиков Холла вводятся специальные схемы снижения температурной нестабильности датчиков и магнитов, а также схемы линеаризации аналоговых выходов. Для достижения высокой повторяемости параметров от датчика к датчику в процессе производства используется лазерная калибровка элементов схем. Это позволяет производить замену вышедших из строя приборов без последующих подстроек.
Для иллюстрации возможных вариантов исполнения датчиков Холла приводится описание серийных цифровых и аналоговых датчиков фирмы Хонейвелл (Honeywell).
Фирма Хонейвелл выпускает несколько базовых серий цифровых датчиков.
Это специальная высокочувствительная серия 2SSP-датчиков, использование которых позволяет располагать магнит на расстоянии 2 см и более от датчика. Датчики выполнены в пластиковом корпусе с размерами 4,5х4,5х1,5 мм. Выпускаются модификации для поверхностного монтажа с короткими формованными выводами - серия 2SSP-S.
Две серии биполярных цифровых датчиков SS41 и SS11 изготавливаются в миниатюрных корпусах, имеющих размеры 4х3х1,5 мм. Датчики серии SS11 выпускаются в корпусах типа SOT89, предназначенных для поверхностного монтажа (SMD - Surface Mount Device). Все датчики имеют защиту от неправильного подключения и диапазон быстродействия от 0 до 100 кГц.
Датчики серий SS400 и SS100 представляют собой приборы, состоящие из собственно датчиков поля и выходных усилителей, и имеющие выход типа "открытый коллектор". Они выпускаются в миниатюрных пластиковых корпусах с тремя выводами. Специальная конструкция корпуса (Quad-Hall-дизайн) позволяет полностью исключить внутренние механические напряжения. Для компенсации температурного дрейфа параметров предусмотрена специальная схема коррекции. Датчики предусматривают различные варианты работы:
· под действием одного полюса магнита (SS411A, SS413A,SS111A, SS113A);
· обоих полюсов (SS441A, SS443A, SS449A, SS141A, SS143A, SS149A)
· и триггер (SS461A, SS466A, SS161A, SS166A, SS561AT, SS566AT).
Серия SS400 (с индексом S) имеет корпус с формованными для поверхностного монтажа выводами, а серия SS100 - миниатюрный безвыводной SMD-корпус.
Приборы серий 103SR и SR3 представляют собой полностью закрытые датчики в алюминиевом или пластиковом корпусе (диаметр 12 мм, длина 25 мм с резьбой), имеющие защиту от неправильного включения. Внутри серии датчики отличаются друг от друга величиной измеряемого поля и типами выхода.
Фирма Хонейвелл использует лазерную подгонку при изготовлении аналоговых датчиков Холла, что позволяет получать идентичные параметры от образца к образцу и производить замены вышедших из строя приборов без последующих подстроек. Аналоговые датчики представлены сериями SS49, SS19, SS495, SS94 и 103SR.
Датчики серий SS49 и SS19 имеют параметрический линейный выход. Они изготавливаются в миниатюрных корпусах с выводами (серия SS49) и для поверхностного монтажа (SMD) - серия SS19.
Приборы серии SS495 имеют размеры корпуса 3х4 мм. Эти датчики отличаются низким энергопотреблением (7 мА при напряжении питания 5 В) и линеаризованным выходом. Температурная ошибка для разных датчиков этой серии составляет:
· SS495A - + 0,06 %;
· SS495A1 - + 0,04 %;
· SS495A2 - + 0,07 %.
Датчики серии SS94 имеют специальные встроенные схемы для увеличения температурной стабильности.
Серию аналоговых датчиков Холла 103SR отличает исполнение последних в алюминиевом корпусе с резьбой.
В таблице 1 приведены типы датчиков Холла без встроенного магнита.
Наименование |
Диапазон рабочих величин магнитного потока [Гаусс] |
Полярность датчика |
Напряжение питания U [B] |
Макс. выходное пряжение Usp [B] |
Чувствительность мВ/G |
Потребляемый ток [mA] |
Макс. рабочая частота [кГц] |
Корпус |
Диапазон рабочих температур[0C] |
Датчики с цифровым выходом |
|||||||||
103SR11A-1 |
50+735 |
Униполярн. |
4.5 - 5.5 |
1500 |
|
4 |
|
Рис. 10 |
40+ 100 |
103SR12A-1 |
40+495 |
Униполярн. |
6 - 24 |
1500 |
|
10 |
|
Рис. 10 |
40+ 100 |
103SR13A-1 |
40+475 |
Униполярн. |
4.5 - 24 |
400 |
|
10 |
|
Рис. 10 |
40+ 100 |
103SR14A-1 |
5+160 |
Униполярн. |
4.5 - 24 |
400 |
|
10 |
|
Рис. 10 |
40+ 100 |
103SR17A-1 |
-205+180 |
Биполярный |
4.5 - 24 |
400 |
|
10 |
|
Рис. 10 |
40+ 100 |
103SR18-1 |
-50+120 |
Пороговый |
4.5 - 24 |
400 |
|
10 |
|
Рис. 10 |
40+ 100 |
SR3F-A1 |
20+450 |
Униполярн. |
4.5 - 24 |
400 |
|
18 |
100 |
Рис. 11 |
40+ 100 |
SR3B-A1 |
-150+150 |
Биполярный |
4.5 - 24 |
400 |
|
15 |
100 |
Рис. 11 |
40+ 100 |
SR3G-A1 |
70+430 |
Униполярн. |
4.5 - 24 |
400 |
|
22 |
100 |
Рис. 11 |
40+ 100 |
SR3C-A1 |
30+190 |
Униполярн. |
4.5 - 24 |
400 |
|
19 |
100 |
Рис. 11 |
40+ 100 |
SR4P2-A1 |
4+25 |
Омниполярн. |
6 - 24 |
400 |
|
13.5 |
100 |
Рис. 11 |
40+ 100 |
2SSP |
4+25 |
Биполярный |
6 - 24 |
400 |
|
13.5 |
100 |
Рис. 1 |
20+ 85 |
SS411A |
-70+70 |
Биполярный |
3.8 - 30 |
400 |
|
10 |
|
Рис. 2 |
40+ 125 |
SS413A |
-140+140 |
Биполярный |
3.8 - 30 |
400 |
|
10 |
|
Рис. 2 |
40+ 125 |
SS441A |
5+135 |
Униполярн. |
3.8 - 30 |
400 |
|
10 |
|
Рис. 2 |
40+ 125 |
SS443A |
5+215 |
Униполярн. |
3.8 - 30 |
400 |
|
10 |
|
Рис. 2 |
40+ 125 |
SS449A |
30+435 |
Униполярн. |
3.8 - 30 |
400 |
|
10 |
|
Рис. 2 |
40+ 125 |
SS461A |
-110+110 |
Пороговый |
3.8 - 30 |
400 |
|
10 |
|
Рис. 2 |
40+ 125 |
SS466A |
-200+200 |
Пороговый |
3.8 - 30 |
400 |
|
10 |
|
Рис. 2 |
40+ 125 |
SS111A |
-65+70 |
Биполярный |
3.8 - 30 |
400 |
|
10 |
|
Рис. 3 |
40+ 125 |
SS113A |
-140+140 |
Биполярный |
3.8 - 30 |
400 |
|
10 |
|
Рис. 3 |
40+ 125 |
SS141A |
8+135 |
Униполярн. |
3.8 - 30 |
400 |
|
10 |
|
Рис. 3 |
40+ 125 |
SS143A |
-10+215 |
Униполярн. |
3.8 - 30 |
400 |
|
10 |
|
Рис. 3 |
40+ 125 |
SS149A |
30+440 |
Униполярн. |
3.8 - 30 |
400 |
|
10 |
|
Рис. 3 |
40+ 125 |
SS161A |
-110+50 |
Пороговый |
3.8 - 30 |
400 |
|
10 |
|
Рис. 3 |
40+ 125 |
SS166A |
-180+200 |
Пороговый |
3.8 - 30 |
400 |
|
10 |
|
Рис. 3 |
40+ 125 |
SS41 |
-200+250 |
Биполярный |
4.5 - 24 |
150 |
|
6 |
100 |
Рис. 4 |
55+ 150 |
SS11 |
-200+200 |
Биполярный |
4.5 - 24 |
150 |
|
6 |
100 |
Рис. 5 |
40+ 125 |
SS526DT |
-130+130 |
Биполярный |
-0.5 - 30 |
400 |
|
7.5 |
1 min |
Рис. 12 SOT89 |
40+ 125 |
Датчики с аналоговым выходом |
|||||||||
SS49 |
-/+ 1000 |
Биполярный |
4 10 |
0.65*Usp |
0.6 1.25 |
4 |
|
Рис. 6 |
0+ 50 |
SS94B1 |
-/+ 670 |
Биполярный |
4.5 12 |
Usp 0.4 |
3.125 |
11 |
8 |
Рис. 7 |
50+ 150 |
SS94A1 |
-/+ 500 |
Биполярный |
6.6 12 |
Usp 0.4 |
5.0 |
13 |
8 |
Рис. 8 |
40+ 125 |
SS94A1B |
-/+ 500 |
Биполярный |
4.5 8 |
Usp 0.4 |
1.875 |
17.5 |
8 |
Рис. 8 |
40+ 125 |
SS94A1F |
-/+ 100 |
Биполярный |
6.6 12 |
Usp 0.4 |
25.0 |
30 |
8 |
Рис. 8 |
40+ 125 |
SS94A2 |
-/+ 500 |
Биполярный |
6.6 12 |
Usp 0.4 |
25.0 |
30 |
8 |
Рис. 8 |
40+ 125 |
SS495A |
-/+ 600 |
Биполярный |
4.5 10 |
Usp 0.4 |
3.125 |
7 |
|
Рис. 9 |
40+ 150 |
SS495A1 |
-/+ 600 |
Биполярный |
4.5 10 |
Usp 0.4 |
3.125 |
7 |
|
Рис. 9 |
40+ 150 |
SS496A |
-/+ 840 |
Биполярный |
4.5 10 |
Usp 0.4 |
2.5 |
7 |
|
Рис. 9 |
40+ 125 |
SS51T |
-/+ 250 |
Биполярный |
4.5 24 |
Usp 0.4 |
|
10 |
|
SOT89 |
40+ 150 |
SS511AT |
-/+ 70 |
Биполярный |
3.8 30 |
Usp 0.4 |
|
10 |
|
SOT89 |
40+ 150 |
SS513AT |
-/+ 140 |
Биполярный |
3.8 30 |
Usp 0.4 |
|
10 |
|
SOT89 |
40+ 150 |
SS541AT |
5+135 |
Униполярн. |
3.8 30 |
Usp 0.4 |
|
10 |
|
SOT89 |
40+ 150 |
SS543AT |
5+215 |
Униполярн. |
3.8 30 |
Usp 0.4 |
|
10 |
|
SOT89 |
40+ 150 |
SS549AT |
30+440 |
Униполярн. |
3.8 30 |
Usp 0.4 |
|
10 |
|
SOT89 |
40+ 150 |
SS561AT |
-/+ 110 |
Пороговый |
3.8 30 |
Usp 0.4 |
|
10 |
|
SOT89 |
40+ 150 |
SS566AT |
-/+ 200 |
Пороговый |
3.8 30 |
Usp 0.4 |
|
10 |
|
SOT89 |
40+ 150 |
SS49E |
650/1000 |
Биполярный |
3.0 6.5 |
0.95 |
|
6 |
|
Рис. 13 вывод. |
40+ 100 |
SS59ET |
650/1000 |
Биполярный |
3.0 6.5 |
0.95 |
|
6 |
|
SOT89 |
40+ 10 |
Магниторезисторы
Магниторезисторы - это электронные компоненты, действие которых основано на изменении электрического сопротивления полупроводника (или металла) при воздействии на него магнитного поля.
Механизм изменения сопротивления довольно сложен, так как является результатом одновременного действия большого числа разнообразных факторов. К тому же он неодинаков для разных типов приборов, технологий и материалов. Магниторезисторы характеризуются такими параметрами, как магнитная чувствительность, номинальное сопротивление, рабочий ток, термостабильность и быстродействие, диапазон рабочих температур.
Выделяются две большие группы магниторезисторов, которые условно можно разделить на «монолитные» и «пленочные».
«Монолитные» магниторезисторы. Принцип действия монолитных магниторезисторов основан на эффекте Гаусса, который характеризуется возрастанием сопротивления проводника (или полупроводника) при помещении его в магнитное поле. Конструкция «монолитного» магниторезистора приведена на рис11.18 .
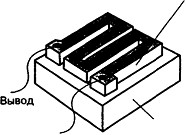
Подложка
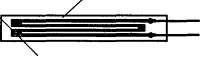
Рис. 11.18. Конструкция «монолитного» магниторезистора
![]()
г)

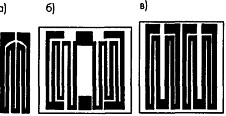
Рис. 11.19. Варианты топологии МЧЭ «монолитных» магниторезисторов
Магниторезистор представляет собой подложку с размещенным на ней магниточувствительным элементом (МЧЭ). Подложка обеспечивает механическую прочность прибора. Элемент приклеен к подложке и защищен снаружи слоем лака. МЧЭ может размещаться в оригинальном или стандартном корпусе и снабжаться ферритовым концентратором магнитного поля или «смещающим» постоянным микромагнитом.
«Монолитные» магниточувствительные элементы изготавливаются из полупроводниковых материалов, обладающих высокой подвижностью носителей заряда. К таким материалам относятся антимонид индия (InSb) и его соединения арсенид индия (InAs) и др.
В зависимости от назначения прибора МЧЭ могут иметь различную форму. Наиболее известны МЧЭ прямоугольной формы и имеющие вид меандра (рис. 11.19а
Элементы, показанные на рис. 11.19г, предназначены для использования в магнитоуправляемых устройствах с круговым перемещением источника магнитной индукции. Магниточувствительный элемент, изображенный на рис.ж, представляет собой круговой магниторезистивный мост.
Нагрузочная способность магниторезистора определяется в документации на прибор одним из следующих параметров:
- значением мощности, которую может рассеять магниторезистор Рмакс;
- значением предельно допустимого тока Iмакс;
- значением теплового сопротивления λ.
Рабочее напряжение для магниторезистора (Uп) рассчитывается по формуле:
Uп =√(TмаксЧ TА )Ч λ ЧR (Tмакс ) (11.35)
где λ - тепловое сопротивление конструкции магниторезистора;
Tмакс , TА - максимально допустимая температура прибора и температура окружающей среды;
R (Тмакс) - сопротивление МЧЭ при максимальной температуре.
Из этого выражения для каждого значения температуры окружающей среды можно определить допустимую нагрузку для конкретного типа магниторезистора. Параметр λ обычно определяется экспериментально изготовителем прибора в среде неподвижного воздуха. Значение λ указывается в технической документации на магниторезистор.
Максимальную мощность Рмакс можно значительно повысить (в 1,5-2 раза) при использовании элементарного теплоотвода, если, например, магниторезистор с обеих сторон привести в плотное соприкосновение с металлическими полюсами магнитопровода.
Тонкопленочные магниторезисторы больше подходят для регистрации слабых магнитных полей (до 10-30 мТл), иногда близких к пороговым значениям. При этом следует помнить, что порог чувствительности определяется минимальным уровнем магнитного излучения, регистрируемым преобразователем магнитного поля при отношении сигнал/шум равном единице. Порог чувствительности характеризуется многими параметрами МЧЭ: величиной остаточного напряжения, уровнем собственных шумов, величиной тока управления и т.д. Значение остаточного напряжения зависит от направления и значения тока управления, от температуры элемента.
Температурное изменение чувствительности магниторезисторов на основе ФМП при питают от источника постоянного тока составляет около -0,04% на градус Цельсия, что в 5-10 раз меньше, чем у «монолитных» магниторезисторов .
Кроме того, при использовании в ограниченном динамическом диапазоне (до10 мТл) тонкопленочные магниторезисторы выгодно отличаются от других преобразователей магнитного поля.
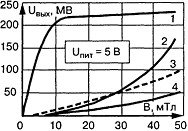
На рис.11.21.приведены выходные характеристики различных преобразователей магнитного поля при одинаковом напряжении питания равном 5 В.
Из рис11.21. видно, что при магнитной индукции 5 мТл, соответствующей линейным участкам всех приведенных характеристик, чувствительность тонкопленочных магниторезисторов в 5 раз выше чувствительности других магниточувствительных приборов.
Магнитодиоды
Магнитодиод - это полупроводниковый прибор с p-n-переходом и невыпрямляющим контактом (омическим или антизапирающим), между которыми находится область высокоомного полупроводника (рис. 2). Пример внешнего вида магнитодиода показан на рис. 1.
 Рис.
1. Магнитодод КД304.
Рис.
1. Магнитодод КД304.
В основе работы магнитодиода лежит магнитодиодный эффект, возникающий при помещении полупроводника с неравновесной проводимостью в магнитное поле B. Магнитодиодный эффект может наблюдаться в любой полупроводниковой структуре, в которой создана положительная или отрицательная неравновесная проводимость.
 Рис.
2. Структура магнитодиода.
Рис.
2. Структура магнитодиода.
От обычных полупроводниковых диодов магнитодиод отличается тем, что он изготавливается из высокоомного полупроводника, проводимость которого близка к собственной, а длина базы d в несколько раз больше длины диффузного смещения носителей L. В обычных диодах d меньше L.
На рис. 3 показана вольт-амперная характеристика (ВАХ) «торцевого» магнитодиода.
 Рис.
3. Вольт-амперная характеристика
магнитодиода.
Рис.
3. Вольт-амперная характеристика
магнитодиода.
В прямом направлении при высоких уровнях инжекции проводимость магнитодиода определяется инжектированными в базу неравновесными носителями. Падение напряжение происходит не на p-n-переходе, как в обычном диоде, а на высокоомной базе. Если магнитодиод, через который протекает ток, поместить в поперечное магнитное поле B, то произойдёт увеличение сопротивления базы. Это приведёт к уменьшению тока через магнитодиод (см. рис. 3).
Свойства магнитодиодов характеризуются вольтовой и токовой магниточувствительностью.
Вольтовая магниточувствительность γU определяется изменением напряжения на магнитодиоде при изменении магнитного поля на 1 мТл и постоянном значении тока через магнитодиод.
Токовая магниточувствительность γI определяется изменением тока через магнитодиод при изменении магнитного поля на 1 мТл и при постоянном (неизменном) напряжении на магнитодиоде.
Условное графическое обозначение (УГО) магнитодиода приведено на рис. 4.
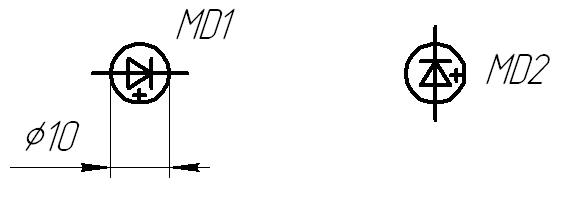 Рис.
4. УГО магнитодиода.
Рис.
4. УГО магнитодиода.