

2 Функциональная схема регулирования
Рисунок 1 –Функциональная схема
3 Описание функциональной схемы и системы регулирования
Функциональная схема является основным техническим документом, определяющим структуру узлов контроля и регулирования технологического процесса и оснащения объекта управления приборами и средствами автоматизации. Задачи автоматизации объекта решается наиболее эффективно тогда, когда она разрабатывается в непосредственной связи с разработкой технологического процесса.
При разработке функциональных схем автоматизации объекта либо процесса необходимо учесть следующие вопросы:
- получение первичной информации о состоянии технического процесса и оборудования;
- непосредственное воздействие на технологический процесс для управления им;
- стабилизация технологических параметров процесса;
- контроль и регистрация технических параметров, процессов и состояния технологического оборудования.
В соответствии с методическими указаниями по объёму оснащения КИП и А, функциональная схема теплотехнического контроля оснащена следующими контрольно-измерительными приборами:
TT
- первичный измерительный преобразователь для измерения температуры, установленный по месту;
PT
- первичный измерительный преобразователь для измерения давления, установленный по месту;
FT
-прибор для измерения расхода, бесшкальный, с дистанционный передачей показаний, установленный по месту;
-
PIR
прибор для измерения давления, показывающий, установленный на щите;
TIR
- показывающий прибор для измерения температуры, установленный на щите;
FIR
- показывающий прибор для измерения уровня, установленный на щите;
FE
- первичный измерительный преобразователь для измерения расхода, установленный по месту;
4 Описание закона регулирования
Пропорционально-интегральный закон – регулирующее воздействие прямо пропорционально сумме ошибки регулирования и интегралу от ошибки регулирования взятому с весовым коэффициентом обратно пропорциональным времени интегрирования.

Это уравнение соответствует следующей передаточной функции
 ;
;
 ;
;
ПИ регулятор можно представить, как соединение двух параллельных звеньев: П звена и И звена.
Схема 1- соединение П звена и И звена.
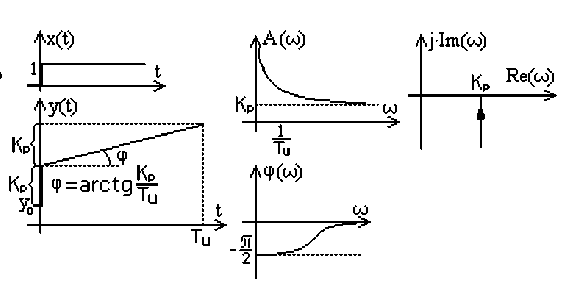
Рисунок 2 Переходная характеристика ПИ регулятора.
Рисунок 3 Частотные характеристики ПИ закона регулирования
Переходная характеристика ПИ регулятора строится путем графического сложения переходный характеристик его отдельных звеньев. На (рисунке 7) также представлены КЧХ, АЧХ, ФЧХ.
Время интегрирования (удвоения) — это время, в течение которого интегральная составляющая изменит выходную величину y на столько, сколько изменила ее перед этим пропорциональная составляющая. Время удвоения служит мерой интенсивности интегральной части.
Пропорционально-интегральный закон регулирования — самый распространенный так как он объединяет в себе лучшие свойства пропорционального и интегрального законов, но иногда ПИ-закон бывает недостаточно быстрым.
Достоинства ПИ-закона:
Отсутствие статической ошибки регулирования благодаря наличию И-составляющей.
Динамическая ошибка меньше по сравнению с И-регулятором.
Обеспечивает хорошее качество регулирования для широкого диапазона объектов включая объекты без самовыравнивания (благодаря П-состовляющей).
Обеспечивает хорошую устойчивость качества регулирования из-за пологости заданного запаса устойчивости в координатах параметров динамической настройки регулятора
Недостатки ПИ – регулятора:
Два параметра настройки Кр и Ти и следовательно сложность настройки(по сравнению с П- и И-регуляторами).
Качество регулирования хуже, чем у ПИД-регулятора.
Введение И-состовляющей в замкнутой САР приводит к отстованию по фазе на 900, что приближает график КЧХ к опасной точке с координатами (-1;0).