

1.
Системы линейных уравнений: основные понятия
Определение. Система линейных уравнений — это объединение из n линейных уравнений, каждое из которых содержит k переменных. Записывается это так:

Многие, впервые сталкиваясь с высшей алгеброй, ошибочно полагают, что число уравнений обязательно должно совпадать с числом переменных. В школьной алгебре так обычно и бывает, однако для высшей алгебры это, вообще говоря, неверно.
Определение. Решение системы уравнений — это последовательность чисел (k1,k2, ..., kn), которая является решением каждого уравнения системы, т.е. при подстановке в это уравнение вместо переменных x1, x2, ..., xn дает верное числовое равенство.
Соответственно, решить систему уравнений — значит найти множество всех ее решений или доказать, что это множество пусто. Поскольку число уравнений и число неизвестных может не совпадать, возможны три случая:
Система несовместна, т.е. множество всех решений пусто. Достаточно редкий случай, который легко обнаруживается независимо от того, каким методом решать систему.
Система совместна и определена, т.е. имеет ровно одно решение. Классический вариант, хорошо известный еще со школьной скамьи.
Система совместна и не определена, т.е. имеет бесконечно много решений. Это самый жесткий вариант. Недостаточно указать, что «система имеет бесконечное множество решений» — надо описать, как устроено это множество.
Определение. Переменная xi называется разрешенной, если она входит только в одно уравнение системы, причем с коэффициентом 1. Другими словами, в остальных уравнениях коэффициент при переменной xi должен быть равен нулю.
Если в каждом уравнении выбрать по одной разрешенной переменной, получим набор разрешенных переменных для всей системы уравнений. Сама система, записанная в таком виде, тоже будет называться разрешенной. Вообще говоря, одну и ту же исходную систему можно свести к разным разрешенным, однако сейчас нас это не волнует. Вот примеры разрешенных систем:

Обе системы являются разрешенными относительно переменных x1, x3 и x4. Впрочем, с тем же успехом можно утверждать, что вторая система — разрешенная относительно x1, x3 и x5. Достаточно переписать самое последнее уравнение в видеx5 = x4.
Теперь рассмотрим более общий случай. Пусть всего у нас k переменных, из которыхr являются разрешенными. Тогда возможны два случая:
Число разрешенных переменных r равно общему числу переменных k: r = k. Получаем систему из k уравнений, в которых r = k разрешенных переменных. Такая система является совместной и определенной, т.к. x1 = b1, x2 = b2, ..., xk = bk;
Число разрешенных переменных r меньше общего числа переменных k: r < k. Остальные (k − r) переменных называются свободными — они могут принимать любые значения, из которых легко вычисляются разрешенные переменные.
Так, в приведенных выше системах переменные x2, x5, x6 (для первой системы) и x2, x5(для второй) являются свободными. Случай, когда есть свободные переменные, лучше сформулировать в виде теоремы:
Теорема. Если в системе из n уравнений переменные x1, x2, ..., xr — разрешенные, а xr + 1, xr + 2, ..., xk — свободные, то:
Если задать значения свободным переменным (xr + 1 = tr + 1, xr + 2 = tr + 2, ..., xk = tk), а затем найти значения x1, x2, ..., xr, получим одно из решений.
Если в двух решениях значения свободных переменных совпадают, то значения разрешенных переменных тоже совпадают, т.е. решения равны.
В чем смысл этой теоремы? Чтобы получить все решения разрешенной системы уравнений, достаточно выделить свободные переменные. Затем, присваивая свободным переменным разные значения, будем получать готовые решения. Вот и все — таким образом можно получить все решения системы. Других решений не существует.
Вывод: разрешенная система уравнений всегда совместна. Если число уравнений в разрешенной системе равно числу переменных, система будет определенной, если меньше — неопределенной.
15. Выражение видаλ1*A1+λ2*A2+...+λn*An называется линейной комбинацией векторов A1, A2,...,An с коэффициентами λ1, λ2,...,λn.
Определение линейной зависимости системы векторов
Система векторов A1, A2,...,An называется линейно зависимой, если существует ненулевой набор чисел λ1, λ2,...,λn,при котором линейная комбинация векторов λ1*A1+λ2*A2+...+λn*An равна нулевому вектору, то есть система уравнений: A1x1+A2x2+...+Anxn =Θ имеет ненулевое решение. Набор чисел λ1, λ2,...,λn является ненулевым, если хотя бы одно из чисел λ1, λ2,...,λn отлично от нуля.
Определение линейной независимости системы векторов
Система векторов A1, A2,...,An называется линейно независимой, если линейная комбинация этих векторовλ1*A1+λ2*A2+...+λn*An равна нулевому вектору только при нулевом наборе чисел λ1, λ2,...,λn, то есть система уравнений: A1x1+A2x2+...+Anxn =Θ имеет единственное нулевое решение.
Пример 29.1
Проверить, является ли линейно зависимой система векторов

Решение:
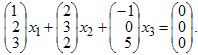
1. Составляем систему уравнений:
2. Решаем ее методом Гаусса. Преобразования Жордано системы приведены в таблице 29.1. При расчете правые части системы не записываются так как они равны нулю и при преобразованиях Жордана не изменяются.
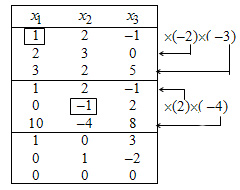
3. Из последних трех строк таблицы записываем разрешенную систему, равносильную исходной системе:
![]()
4. Получаем общее решение системы:
![]()
5. Задав по своему усмотрению значение свободной переменной x3 =1, получаем частное ненулевое решение X=(-3,2,1).
Ответ: Таким образом, при ненулевом наборе чисел (-3,2,1) линейная комбинация векторов равняется нулевому вектору -3A1+2A2+1A3=Θ. Следовательно, система векторов линейно зависимая.