1.4 Построение планов ускорений и определение угловых скоростей частей механизма
Планы ускорений строим тоже для двух положений: первого заданного и нулевого.
Для положения φ=90о
Ускорение точки А:
![]()
Выбираем отрезок для изображения ускорения точки А:
![]()
Тогда масштабный коэффициент ускорений:
![]()
Строим план ускорений.
Определим ускорение точки В:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Определим ускорение точки D:
![]()
![]()
Определяем угловые ускорения звеньев:
![]()
![]()
Нулевое положение рассчитывается аналогично.
Таблица 3 – Линейные и угловые скорости стержневого механизма
Данные |
Положение φ=900 |
Положение φ0 |
|
4,716 |
4,716 |
|
0,0005 |
1,738 |
|
2,98 |
0 |
|
1,766 |
6,217 |
|
0,416 |
8,961 |
|
3,009 |
8,961 |
|
1,766 |
6,456 |
|
5,198 |
15,477 |
|
6,196 |
21,815 |
|
2,524 |
54,307 |
1.5 Аналитический расчет кинематических параметров движения звеньев механизма
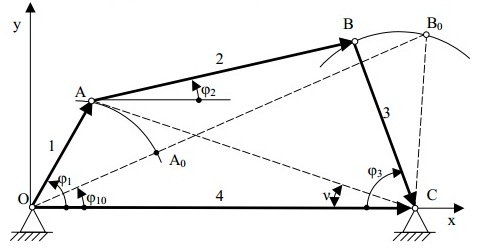
Рисунок 3 - Шарнирный четырехзвенный механизм
Для того чтобы сравнить значения кинематических параметров движения звеньев 2 и 3(рис.3), полученных графическим методом со значениями аналитического метода, в курсовом проекте использованы ЭВМ.
Исходные данные: lOA = l1; lАВ = l2; lВС = l3; lОС = l4; ω1 = const.
Угол φ1 – обобщенная координата механизма, определяющая положение кривошипа.
Необходимо определить углы φ2 и φ3, определяющие положения шатуна 2 и коромысла 3, угловые скорости этих звеньев ω2 и ω3, а также их угловые ускорения ε2 и ε3.
Векторный контур, образованный звеньями механизма (рис.3), можно показать уравнением:
![]() .
.
Спроецировав полученное ранее векторное уравнение на оси x и y, получаем:
![]()

![]()
Так как
![]() ,
то
,
то
![]() ,
,
![]() .
.
В ведем
следующие обозначения:
ведем
следующие обозначения:
![]()
![]()
Тогда получаем:
![]()
![]()
Для удобства введём обозначения:
![]()
![]()
![]()
Тогда, после соответствующих замен, получаем:
![]()
![]()
Угловые скорости и ускорения звеньев 2 и 3 определяем, взяв первую производную по времени t и выполнив необходимые преобразования:
![]()
![]()
![]()
![]()
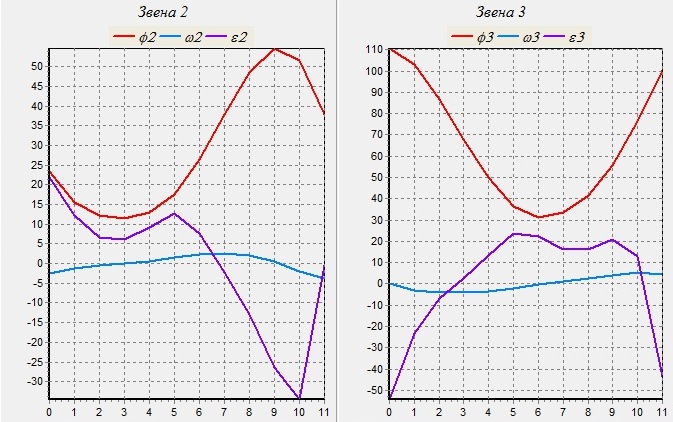
По приведенному выше алгоритму программа вычисляет значения кинематических параметров движения звеньев 2 и 3, и строит их графики.
Таблица 4 – Данные, вводимые в программу расчета
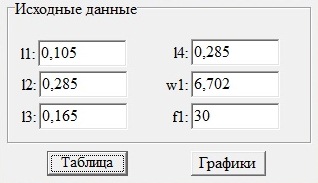
Таблица 5 - Результаты расчета по программе
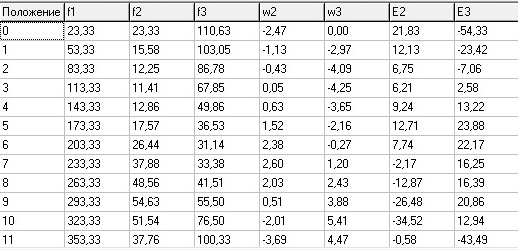
Таблица 6 – Сравнение параметров
-
Положение
механизма
Метод
иссле-дования
φ1,
град.
φ2,
град.
φ3,
град.
ω2,
рад/с
ω3,
рад/с
ε2,
рад/с2
ε3,
рад/с2
φ1=0о
Аналитич.
23,33
23,33
110,63
-2,47
0,00
21,83
-54,33
Графич.
23,33
23,33
110,63
2,469
0,00
21,815
54,307
Расхождение в %
0,00
0,00
0,00
0,04
0,00
0,06
0,04
φ1*=90о
Аналитич.
113,33
11,41
67,85
0,05
-4,25
6,21
2,58
Графич.
113,33
11,41
67,85
0,044
4,25
6,196
2,524
Расхождение в %
0,00
0,00
0,00
1,2
0,00
0,02
2,1
График 1 – Кинематические параметры движения звеньев 2 и 3