

Введение
Целью курсового проекта является проектирование и исследование стержневого механизма замыкания контактов, а также зубчатого редуктора.
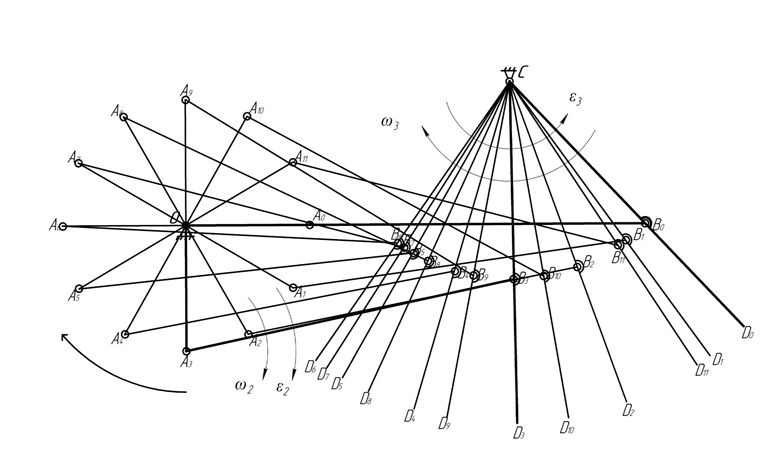
Рисунок 1 – Схема стержневого механизма
Стержневой механизм (рис.1) приводится в движение от электродвигателя через редуктор, состоящий из цилиндрических зубчатых колес 1, 2, 3, 4 и 5(рис.2). Вращательное движение кривошипа АО преобразуется в возвратно-поступательное движение коромысла CBD, которое производит замыкание контактов.
Исходные данные: nдв=1500мин-1, n0=64мин-1, z4=14, z5=32, m=4мм, lOA=105мм, lAB=285мм, lBC=165мм, lCD=285мм, х=275мм, у=120мм, φ*=900, h=95мм.

Рисунок 2 – Кинематическая схема зубчатого редуктора.
Кинематическое исследование механизма
1.1 Структурный анализ механизма
Таблица 1– Характеристика звеньев
№ звена |
Название звена |
Вид абсолютного движения звена |
1 |
кривошип |
вращательное |
2 |
шатун |
плоскопараллельное |
3 |
коромысло |
возвратно - вращательное |
4 |
стойка |
неподвижная |
Анализ кинематических пар:
1-4: низшая, плоская (относительное движение вращательное), одноподвижная;
1-2: низшая, плоская (относительное движение вращательное), одноподвижная;
2-3: низшая, плоская (относительное движение вращательное), одноподвижная;
3-4: низшая, плоская (относительное движение вращательное), одноподвижная;
Данная кинематическая цепь замкнутая (т.к. все звенья входят не менее чем в две кинематические пары), плоская (т.к. каждое звено относительно всех остальных звеньев совершает плоское движение) и простая (т.к. все звенья входят в две кинематические пары)
Так как данный механизм плоский для вычисления числа степеней свободы можно использовать формулу Чебышева:
![]()
где W – число степеней свободы механизмов,
n – число подвижных звеньев,
P1 – количество одноподвижных пар,
P2 – количество двухподвижных пар.
W=3ˑ(4-1)-2ˑ4-0=1.
1.2 Построение планов механизма
Принимаем μl = 0,002 м/мм и строим 12 положений планов механизма. Длины звеньев на чертеже:
ОА = lOA /μl =0,105/0,002=52,5 мм,
АВ = lAB /μl = 0,285/0,002=142,5 мм,
ВС = lВС /μl=0,165/0,002=82,5 мм,
CD = lCD /μl = 0,285/0,002=142,5 мм.
1.3 Построение планов скоростей и определение угловых скоростей частей механизма
Расчеты скоростей для двух положений механизма.
Определяем ω1:
ω1
= ![]() .
.
Скорость точки А:
VА = ω1 · l0A =6,7 · 0,105=0,704 м/с.
Определяем
масштабный коэффициент: принимаем
(Pva)
= 70,4
мм, тогда масштабный коэффициент μV
= 0,01![]() .
.
Для положения φ=90о
Скорость точки B определяем графически:
VB = VА + VB-A , где VB-A = (ab)·μV = 0,13 · 0,01 = 0,013 м/с,
VB = PVb · μV = 70,1 · 0,01 = 0,701 м/с
Скорость точки D определяем по теореме подобия. Составим пропорцию:
![]()
PVd=
![]() = 0,285 ·
70,1 / 0,165 = 121,1 м/с,
= 0,285 ·
70,1 / 0,165 = 121,1 м/с,
Vd=PVdˑ μV=121,1ˑ0,01=1,211 м/с.
Угловые скорости звеньев:
ω2
= ![]() = 0,013 / 0,285 =
0,044 рад/с,
= 0,013 / 0,285 =
0,044 рад/с,
ω3
= ![]() =
0,701/ 0,165 = 4,25 рад/с.
=
0,701/ 0,165 = 4,25 рад/с.
Нулевое положение рассчитывается аналогично.
Таблица 2 – Линейные и угловые скорости стержневого механизма
Данные |
Положение φ=900 |
Положение φ0 |
VА, м/с |
4,716 |
0,704 |
VB, м/с |
0,0005 |
0 |
VB-A, м/с |
2,98 |
0,704 |
Vd, м/с |
1,766 |
0 |
ω2, рад/с |
0,416 |
2,469 |
ω3, рад/с |
3,009 |
0 |