

1. Основные положения устойчивости электроэнергетических
систем
1.1. Понятие устойчивости. Виды устойчивости
электроэнергетических систем
Понятие устойчивости динамической системы традиционно иллюстрируется примером, представленным на рис. 1.1.











а

б





1
2

1
2
3
Рис. 1.1. Иллюстрация понятия устойчивости динамической системы
На рис. 1.1, а положение 1 является положением устойчивого равновесия, поскольку при отклонениях шарика от этого положения равновесия (в результате возмущения) он возвращается в положение устойчивого равновесия 1. Положение 2 является положением неустойчивого равновесия, поскольку даже при незначительном (малом) отклонении шарика (возмущении) он уходит из этого положения равновесия.
В случае малых возмущений (малых отклонений шарика от положения равновесия) говорят об устойчивости "в малом"; в ЭЭС это соответствует понятию статической устойчивости. В случае существенных больших возмущений (больших отклонениях шарика от положения равновесия) говорят об устойчивости "в большом"; в ЭЭС это соответствует понятию динамической устойчивости. Отличие большого возмущения от малого неопределенно. В дальнейшем введем формальное условие для разграничения малых и больших возмущений. Кроме того, потребуется детализация понятий статической и динамической устойчивости ЭЭС.
В случае, если возмущение настолько велико, что нарушается динамическая устойчивость системы (шарик на рис. 1.1, б в результате такого большого возмущения отклоняется от положения равновесия 1, "проскакивает" положение неустойчивого равновесия 2 и оказывается после некоторых колебаний в устойчивом положении равновесия 3) и система оказывается в другом положении равновесия, говорят о результирующей устойчивости. Некоторые особенности этой ситуации будут подробнее рассмотрены далее.
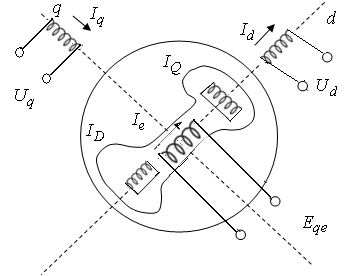
1.2. Идеализированная синхронная машина
Идеализированная синхронная машина, соответствующая представлению ее описания в осях d, q, o в результате преобразования координат от a, b, c к d, q, o, условно показана на рис. 1.2. Здесь представлена обмотка возбуж-
д

Рис. 1.2. Идеализированная синхронная
машина
 ения
на роторе, к которой приложена э.д.с.
возбуждения
ения
на роторе, к которой приложена э.д.с.
возбуждения
 ,
определяемая регулятором возбуждения
(см. ниже), по которой протекает ток
возбуждения
,
определяемая регулятором возбуждения
(см. ниже), по которой протекает ток
возбуждения
 .
На роторе расположены также короткозамкнутые
демпферные обмотки по обеим осям,
призванные гасить колебания ротора при
отклонении его скорости от синхронной
(см. далее), в которых протекают токи
.
На роторе расположены также короткозамкнутые
демпферные обмотки по обеим осям,
призванные гасить колебания ротора при
отклонении его скорости от синхронной
(см. далее), в которых протекают токи
 и
и
 .
Ротор вращается первичным двигателем
(турбиной) в нормальном режиме с угловой
скоростью
.
Ротор вращается первичным двигателем
(турбиной) в нормальном режиме с угловой
скоростью
 где
где
 Гц.
Гц.
Статор
представлен двумя обмоткам – по
продольной (напряжение
 и ток
и ток
 )
и поперечной (напряжение
)
и поперечной (напряжение и ток
и ток
 )
осям. С обмотками статора связана
электрическая сеть, по которой
электроэнергия, вырабатываемая
генератором, доставляется потребителям.
)
осям. С обмотками статора связана
электрическая сеть, по которой
электроэнергия, вырабатываемая
генератором, доставляется потребителям.
Процесс генерации электроэнергии на примере идеализированной синхронной машины выглядит следующим образом.
Регулятор
возбуждения путем приложения к обмотке
возбуждения, расположенной на роторе,
э.д.с. возбуждения создает в этой обмотке
ток возбуждения, постоянный в нормальном
режиме. Ток возбуждения, протекая по
обмотке возбуждения, генерирует
постоянный магнитный поток (магнитное
поле), замыкающийся через ротор и статор
синхронной машины. Векторная диаграмма
составляющих магнитного поля ротора
показана на рис. 1.3. Продольная составляющая
магнитного потока ротора
 определяется током в обмотке возбуждения,
поперечная составляющая – токами
демпферных обмоток и рассеяния ротора.
определяется током в обмотке возбуждения,
поперечная составляющая – токами
демпферных обмоток и рассеяния ротора.
Вращаясь по отношению к статору, магнитное поле ротора индуцирует токи в обмотках статора, которые формируют магнитное поле обмоток статора. Векторная диаграмма составляющих магнитного поля статора показана на рис. 1.4. Составляющие результирующего магнитного поля, получаемого наложением магнитных полей ротора и статора, показаны на рис. 1.5.
Р
 азность
углов
на рис. 1.5 определяется нагрузкой
синхронной машины.
азность
углов
на рис. 1.5 определяется нагрузкой
синхронной машины.
неподвижный статор
d






d













как бы вращающееся поле статора
вращающееся поле ротора
неподвижный статор
1.3. Векторная диаграмма потокосцеп- лений ротора
1.4. Векторная диаграмма потокосцеп- лений статора





d

Рис. 1.5. Векторная диаграмма результирующего магнитного поля синхронной машины










-



В
нормальном режиме
 и ротор под воздействием турбины
вращается с постоянной синхронной
угловой скоростью, соответствующей
номинальной частоте
и ротор под воздействием турбины
вращается с постоянной синхронной
угловой скоростью, соответствующей
номинальной частоте
 50
Гц. Генерация переменного тока в обмотках
статора под воздействием вращающегося
постоянного магнитного потока ротора
условно иллюстрируется на рис. 1.6.
50
Гц. Генерация переменного тока в обмотках
статора под воздействием вращающегося
постоянного магнитного потока ротора
условно иллюстрируется на рис. 1.6.










t
Рис. 1.6. Иллюстрация генерации переменного тока в неподвижных обмотках статора под воздействием вращающегося магнитного поля ротора, создаваемого постоянным током обмотки возбуждения
Пусть
в результате возмущения ротор получил
ускорение по отношению к синхронной
угловой скорости
,
т.е.
 .
В результате асинхронного движения
ротора по отношению к полю статора в
демпферных обмотках возникают токи,
создающие дополнительное потокосцепление
ротора и гасящее ускорение ротора. При
этом обычно вводят условную синхронную
ось (см. рис. 1.5), вращающуюся с неизменной
синхронной угловой скоростью
,
по отношению к синхронной оси рассматривают
движение ротора под воздействием
возмущения.
.
В результате асинхронного движения
ротора по отношению к полю статора в
демпферных обмотках возникают токи,
создающие дополнительное потокосцепление
ротора и гасящее ускорение ротора. При
этом обычно вводят условную синхронную
ось (см. рис. 1.5), вращающуюся с неизменной
синхронной угловой скоростью
,
по отношению к синхронной оси рассматривают
движение ротора под воздействием
возмущения.
Действие
дополнительного магнитного потока,
создаваемого демпферными обмотками,
тормозит отклонение ротора по отношению
к установившемуся его положению.
Возникший тормозящий момент приводит
к тому, что становится
,
однако поскольку тормозящий момент
сохраняется, угловая скорость ротора
продолжает снижаться и становится
равной
 .
Ротор по инерции "проскакивает"
положение равновесия установившегося
режима его движения, после чего возникает
ускоряющий момент, создаваемый магнитным
полем демпферных обмоток, постепенно
тормозящий ротор, который после достижения
некоторого положения по отношению к
статору начинает опять ускоряться,
таким образом, происходят затухающие
(вследствие рассеяния энергии) колебания
ротора по отношению к магнитному полю
статора.
.
Ротор по инерции "проскакивает"
положение равновесия установившегося
режима его движения, после чего возникает
ускоряющий момент, создаваемый магнитным
полем демпферных обмоток, постепенно
тормозящий ротор, который после достижения
некоторого положения по отношению к
статору начинает опять ускоряться,
таким образом, происходят затухающие
(вследствие рассеяния энергии) колебания
ротора по отношению к магнитному полю
статора.
Аналогичный демпфирующий эффект создается автоматическим регулятором возбуждения. Эти эффекты далее будут рассматриваться достаточно подробно.
В
нормальном режиме и при медленных
изменениях режима определяющим является
результирующее потокосцепление по
продольной оси
 ,
поскольку токи и соответствующие
потокосцепления по оси q
малы. Потокосцеплению
соответствует э.д.с.
,
поскольку токи и соответствующие
потокосцепления по оси q
малы. Потокосцеплению
соответствует э.д.с.
 за синхронным реактивным сопротивлением
за синхронным реактивным сопротивлением
 .
В схеме замещения синхронная машина в
этом случае представляется, как на рис.
1.7,a
где
.
В схеме замещения синхронная машина в
этом случае представляется, как на рис.
1.7,a
где
 напряжение на шинах синхронной машины,
напряжение на шинах синхронной машины,
 ,
угол ротора по отношению к синхронной
оси.
,
угол ротора по отношению к синхронной
оси.






а б в
Рис. 1.7. Схемы замещения синхронной машины при различных условиях
При
быстрых изменениях режима в результате
возмущения (при электромеханических
переходных процессах) вследствие
инерционности магнитного потока обмотки
возбуждения неизменным некоторое время
остается потокосцепление обмотки
возбуждения
 (впоследствии оно изменяется под
воздействием автоматического регулятора
возбуждения). Процессы в демпферных
обмотках быстро затухают. Потокосцеплению
обмотки возбуждения пропорциональна
переходная э.д.с.
(впоследствии оно изменяется под
воздействием автоматического регулятора
возбуждения). Процессы в демпферных
обмотках быстро затухают. Потокосцеплению
обмотки возбуждения пропорциональна
переходная э.д.с.
 за переходным реактивным сопротивлением
за переходным реактивным сопротивлением
 (см. рис. 1.7,б).
Такое представление синхронной машины
характерно при неучете переходных
электромагнитных процессов в обмотках
статора, которые быстро затухают после
возмущения и не оказывают заметного
влияния на движение ротора синхронной
машины.
(см. рис. 1.7,б).
Такое представление синхронной машины
характерно при неучете переходных
электромагнитных процессов в обмотках
статора, которые быстро затухают после
возмущения и не оказывают заметного
влияния на движение ротора синхронной
машины.
При
еще более быстрых – электромагнитных
– процессах большую роль играют
составляющие магнитного потока от
свободных токов короткозамкнутых
демпферных обмоток, а также электромагнитные
процессы в обмотках статора. Суммарный
магнитный поток ротора
 остается определенное время неизменным
и ему пропорциональна сверхпереходная
э.д.с.
остается определенное время неизменным
и ему пропорциональна сверхпереходная
э.д.с.
 за сверхпереходным реактивным
сопротивлением
за сверхпереходным реактивным
сопротивлением
 (см. рис. 1.7,в).
(см. рис. 1.7,в).