

Дифференциальный магнитный усилитель с обмотками смещения
Чтобы сделать магнитный усилитель чувствительным к полярности тока управления, вводят обмотку смещения wсм, с помощью которой создают постоянное начальное подмагничивание магнитопровода (рис. 10.24). К МДС управления добавляется постоянная величина — МДС смещения, при этом характеристика магнитного усилителя сдвигается влево. Рабочая характеристика усилителя с обмоткой смещения дана на рис. 10.25. Смещение можно менять с помощью резистора Rcм..
Если смещения нет, то при любой полярности тока управления магнитопровод намагничивается. При наличии тока в обмотке смещения магнитопровод изначально уже подмагничен, а ток управления в зависимости от полярности либо увеличивает, либо уменьшает намагниченность магнитопровода. Таким образом, при положительной полярности тока управления ток в рабочей обмотке увеличивается, а при отрицательной полярности уменьшается (в пределах линейного участка характеристики).
Обмотка смещения используется также для начального симметрирования сложных схем, включающих два (или более) магнитных усилителя. В этом случае регулировочный резистор RCM выводится на щит управления автоматической системой.
Для устранения отмеченных ранее недостатков магнитные усилители собирают по различным двухтактным схемам. Наиболее простой из усилителей — дифференциальный магнитный усилитель с обмотками смещения (рис. 10.26). Этот усилитель собран из двух трансформаторных усилителей, но можно использовать и два дроссельных магнитных усилителя.
Рассмотрим его работу.
В цепи нагрузки действуют две ЭДС, индуцируемые в обмотках W2- Эти ЭДС направлены навстречу друг другу. Если управляющий сигнал отсутствует (Uy = 0), то магнитное состояние магнитопроводов W2, полностью компенсируют друг друга. Результирующая ЭДС Е = Е1 — E2=0, ток в нагрузке отсутствует.
Если к управляющим обмоткам пoдведено положительное напряжение, то левый магнитопровод размагничивается, а правый переходит в более насыщенное состояние, ЭДС Е1 увеличивается, а ЭДС E2. уменьшается, результирующая ЭДС Е совпадает по фазе с Е1.
Если к управляющим обмоткам подвести отрицательное напряжение, то левый магнитопровод подмагничивается еще больше, правый размагничивается; ЭДС Е2> Е1и результирующая ЭДС Е совпадает по фазе с E2. Ток в нагрузке Z„ пропорционален результирующей ЭДС E. Зависимость тока Iн в нагрузке от тока управления Iу изображена на рис. 10.27.
Дифференциальный магнитный усилитель с обратной связью
Схема (рис. 10. 28) состоит из двух одинаковых магнитных усилителей, каждый из которых снабжен обмоткой обратной связи, питаемой выпрямленным рабочим током. Управляющие обмотки намотаны так, что в одном усилителе обратная связь положительна, в другом — отрицательна. Регулировочные резисторы Rр обеспечивают начальную регулировку коэффициентов обратной связи. Схема собрана так, что в резисторе нагрузки ZH рабочие токи левого и правого однотактных усилителей направлены встречно.
На рис. 10.29 изображены нагрузочные характеристики левого I1(Iу) и правого I2(Iу) усилителей. Ток в нагрузке Iн рассматривается как алгебраическая сумма направленных встречно токов I1 и I2. (Нагрузочные характеристики усилителей с обратной связью были рассмотрены в § 10.8.)
При положительной полярности тока управления с увеличением Iу ток I1 резко возрастает (положительная обратная связь), ток I2 почти не изменяется (отрицательная обратная связь). Результирующий ток Iн = I1+I2 возрастает, совпадая по фазе с током I1.
При отрицательной полярности тока управления Iу характерp обратной связи меняется (положительная обратная
связь становится отрицательной, и, наоборот, отрицательная—положительной). При этом ток Iн близок по значению к току I2 и совпадает с ним по фазе.
Так как токи I1 и I2 сдвинуты по фазе на 180° относительно друг друга, то результирующий ток в нагрузке Iн меняет фазу на 180° при изменении полярности тока управления.
Из рис. 10.29 видно, что характеристика результирующего тока в нагрузкеIн(Iу) проходит через начало координат и линейна в широком диапазоне изменений Iу.
Коэффициент усиления по току рассмотренной дифференциальной схемы примерно равен коэффициенту усиления однотактных усилителей, составляющих схему, и достигает значений 104— 105 ввиду наличия положительной обратной связи.
Магнитные усилители с насыщающимися реакторами. В таком магнитном усилителе используют два насыщающихся реактора L1 и L2 (рис. 235, а). Каждый из них выполнен в виде катушки 1 (рабочей обмотки) с ферромагнитным сердечником 3 и подмагничивающей обмоткой 2, по которой проходит постоянный ток (ток управления Iv).
Рабочие обмотки 1 реакторов L1 и L2 включают согласованно, чтобы переменные э. д. с. еL1 и еL2, индуцированные в них, складывались, а обмотки управления 2 включают встречно, чтобы э. д. с. ey1 и ey2, индуцированные в них, были направлены навстречу друг другу и взаимно уничтожались.
Входом магнитного усилителя, на который подается управляющий сигнал Uу, являются зажимы а и b обмоток управления обоих реакторов. Выходом усилителя служат точки с и d, к которым подключают нагрузку Rн. Если нагрузка питается переменным током, то она включается последовательно с рабочими обмотками реакторов L1 и L2. Такой магнитный усилитель называют усилителем с выходом на переменном токе. Если нагрузка Rн рассчитана на питание постоянным током, то ее включают через выпрямитель В (рис. 235,б). Магнитный усилитель в этом случае называют усилителем с выходом на постоянном токе.
Источником питания магнитного усилителя служит сеть переменного тока или трансформатор, подключенный к питающей сети (когда напряжение питания отличается от напряжения сети).
Магнитный усилитель обладает способностью усиливать электрические сигналы. Это объясняется тем, что мощность, потребляемая обмоткой управления и расходуемая на ее нагрев, во много раз меньше мощности, передаваемой нагрузке Rн. Поэтому, затрачивая малую мощность в обмотке управления, можно регулировать значительно большую мощность, поступающую к нагрузке Rн. При работе усилителя не происходит какого-либо нарушения закона сохранения энергии. В данном случае передача мощности нагрузке производится не от цепи управления, а от источника
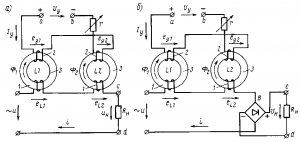 Рис.
235. Схемы магнитных усилителей с
насыщающимися реакторами с выходом на
переменном (а) и постоянном (б) токе
Рис.
235. Схемы магнитных усилителей с
насыщающимися реакторами с выходом на
переменном (а) и постоянном (б) токе
питания переменного тока. Управляющий сигнал Uy постоянного тока позволяет лишь изменять значение этой мощности.
Магнитный усилитель работает следующим образом. Когда на вход усилителя не подается управляющий сигнал (напряжение на входе усилителя Uу и ток управления Iу равны нулю), сердечники реакторов не насыщены и рабочие обмотки 1 имеют большое индуктивное сопротивление. Поэтому ток в цепи нагрузки будет мал. Его называют начальным, или током холостого хода усилителя. Напряжение на нагрузке Uн (выходное напряжение) будет также мало, так как большая часть напряжения питания U теряется в виде падения напряжения IXL в рабочих обмотках. Следовательно, будет мала и мощность, поступающая к нагрузке от источника питания.
При подаче в обмотки управления 2 тока управления Iу сердечники реакторов подмагничиваются и индуктивное сопротивление XL рабочих обмоток 1 уменьшается. При этом растут ток в цепи нагрузки и поступающая к ней мощность.
Для магнитного усилителя справедливо такое же уравнение магнитодвижущих сил, что и для трансформатора:
Fp = Fy
где
Fp = I?p — м. д. с. рабочей обмотки; Fy = Iy?y — м. д. с. обмотки управления; ?p, ?y— число витков рабочей обмотки и обмотки управления.
Отсюда получаем зависимость тока I в цепи рабочих обмоток от тока управления Iу:
I = (?y/?p) Iу (79)
Приведенное соотношение справедливо только до тех пор, пока ток Iу не достигает значения Iy max, при котором сердечники реакторов будут насыщены в течение всего периода изменения питающего напряжения u. В этом случае индуктивное сопротивление рабочих обмоток станет равным нулю и магнитный усилитель теряет свои управляющие свойства.
Зависимость тока 1 в цепи рабочих обмоток от тока управления Iу при постоянном напряжении U источника питания называется характеристикой управления магнитного усилителя. Характеристика управления для идеализированного магнитного усилителя (рис. 236, а), построенная по формуле (79), симметрична относительно оси тока I, так как при изменении направления под-магничивающего тока Iу электромагнитные процессы в усилителе не изменяются.
У реального магнитного усилителя при Iу = 0 существует небольшой ток холостого хода I0 (усилитель имеет некоторое конечное индуктивное сопротивление XL) и характеристика управления (рис. 236, б) не имеет резкого перелома в точке, соответствующей Iу max.
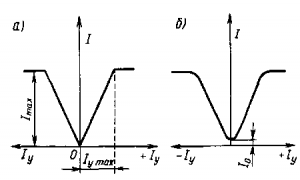 Рис.
236. Характеристики управления
идеализированного (а) и реального (б)
магнитного усилителя
Рис.
236. Характеристики управления
идеализированного (а) и реального (б)
магнитного усилителя
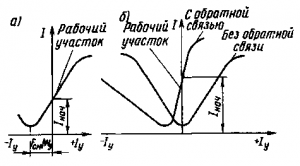 Рис.
237. Характеристики управления при наличии
обмотки смещения (а) и положительной
обратной связи (б)
Рис.
237. Характеристики управления при наличии
обмотки смещения (а) и положительной
обратной связи (б)
Крутизна характеристики управления определяет коэффициенты усиления по току кi, и по мощности кр. Коэффициент усиления по току представляет собой отношение тока I в цепи нагрузки к току Iy в цепи управления, коэффициент усиления по мощности — отношение мощности Рн, передаваемой нагрузке, к мощности Ру, потребляемой обмоткой управления.
Для того чтобы ток холостого хода был по возможности мал, а рабочие участки характеристики имели большую крутизну с целью увеличения коэффициентов усиления по току и по мощности, магнитную систему реакторов L1 и L2 выполняют на тороидальных сердечниках из пермаллоя. Часто применяют сердечники, навитые из холоднокатаной стальной ленты, так же как и в трансформаторах малой мощности. Усилители большой мощности изготовляют из листовой электротехнической стали на П- или Ш-образных сердечниках. Сердечники собирают весьма тщательно. Воздушные зазоры в стыках пластин должны быть по возможности малы. При возникновении зазоров свойства усилителя ухудшаются, так как его индуктивное сопротивление меньше зависит от тока управления. Следовательно, характеристика усилителя становится более пологой — уменьшаются коэффициенты усиления по току к по мощности. Современные магнитные усилители позволяют получать коэффициенты усиления ki ?100 и kp ? 1000.
Магнитный усилитель, выполненный по схемам рис. 235, имеет симметричную характеристику управления, т. е. одинаково реагирует на то или иное направление тока управления. В ряде случаев требуется, чтобы ток нагрузки изменялся различным образом в зависимости от полярности сигнала управления. Для этой цели в усилителе создают некоторое начальное подмагничивание при помощи специальной обмотки, обтекаемой постоянным током Iсм. Она называется обмоткой смещения и располагается на сердечнике так же, как и обмотка управления (при наличии нескольких обмоток управления одну из них обычно используют в качестве обмотки смещения).
При включении обмотки смещения характеристика управления усилителя сдвигается влево (рис. 237, а) на величину Fсм/?y (здесь Fсм = Iсм?см — м. д. с. обмотки смещения). В этом случае при отсутствии тока в обмотке управления ток в цепи нагрузки имеет некоторое значение Iнач, которое будет увеличиваться или уменьшаться в зависимости от направления тока управления Iу. Введение начального подмагничивания одновременно повышает коэффициент усиления для малых токов Iу, поскольку при этом повышается крутизна характеристики управления.
В магнитном усилителе, составленном из двух отдельных реакторов (см. рис. 235), в каждой из обмоток управления могут индуцироваться значительные э. д. с. еу, что заставляет выполнять их с усиленной изоляцией. Поэтому часто оба реактора конструктивно объединяют в один аппарат, который имеет обмотку управления 2, общую для двух реакторов (рис. 238, а). При таком выполнении результирующий магнитный поток, пронизывающий обмотку управления, будет мал и в ней практически не будет индуцироваться э.д.с. Сердечники разделяют немагнитной прокладкой 3, при этом по каждому из стержней, охватываемых обмоткой управления, проходит переменный магнитный поток, который интенсивно перемагничивает сердечники (снимает остаточную индукцию, возникающую при изменении тока управления) и уменьшает тем самым влияние остаточного магнетизма на характеристику усилителя. В некоторых случаях магнитный усилитель выполняют на трехстержневом сердечнике (рис. 238,б).
Обычно магнитные усилители имеют не одну, а несколько обмоток управления, которые позволяют изменять выходное напряжение Uн и ток нагрузки I в зависимости от различных факторов. Например, магнитные усилители, устанавливаемые на некоторых тепловозах, имеют четыре обмотки управления.