

21.Время выхода из метастабильности
Если
требования D-триггера
по времени установления и времени
удержания удовлетворены, то триггер
устанавливается в новое состояние в
пределах интервала времени
 после того как прошел фронт тактового
сигнала. Если эти требования нарушены,
то выход триггера может быть метастабильным
сколь угодно долго. Проектируя некоторую
систему, мы пользуемся параметром
после того как прошел фронт тактового
сигнала. Если эти требования нарушены,
то выход триггера может быть метастабильным
сколь угодно долго. Проектируя некоторую
систему, мы пользуемся параметром
 носящим название времени
выхода из метастабильности,
для обозначения максимального времени,
в течение которого выходной сигнал
может оставаться метастабильным без
ущерба для работы синхронизирующего
устройства (и системы).
носящим название времени
выхода из метастабильности,
для обозначения максимального времени,
в течение которого выходной сигнал
может оставаться метастабильным без
ущерба для работы синхронизирующего
устройства (и системы).
Рассмотрим, например, конечный автомат, изображенный на рисунке.
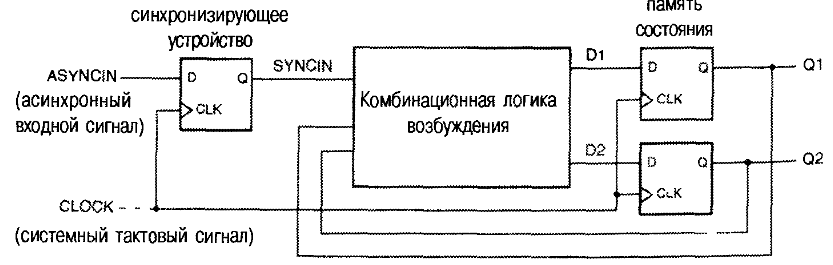
В этом случае мы располагаем следующим временем выхода из метастабильности:
=
 -
-
 -
-

где - период тактового сигнала, задержка распространения сигнала по комбинационной логике и - время установления триггеров, используемых в памяти состояния.
22.Разработка надежного синхронизирующего устройства
Самое надежное синхронизирующее устройство - это такое устройство, которое успевает за отведенное время выйти из метастабильности. Но при проектировании цифровой системы мы редко можем позволить себе роскошь понизить тактовую частоту ради надежности. Обычно, напротив, от нас требуют повысить тактовую частоту, чтобы система обладала лучшими характеристиками. Поэтому чаще всего нам нужно, чтобы синхронизирующее устройство работало надежно при очень малых значениях периода тактового сигнала. Мы представим несколько таких схем и покажем, как можно оценить их надежность.
Как сказано выше, у конечного автомата с асинхронным входом время выхода из метастабильности равно = - - Чтобы сделать возможно большим при заданном периоде тактового сигнала, нам следует минимизировать и Значение определяется типом триггеров, используемых в памяти состояния; в общем случае, у более быстрого триггера время установления меньше. Минимальное значение равно 0 и достигается в синхронизирующем устройстве, приведенном на рисунке; сейчас мы объясним, как работает эта схема.
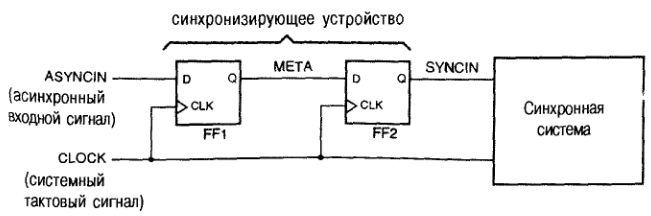
Сигналы на входе триггера FF1 асинхронны по отношению к тактовому сигналу и могут поступать с нарушением требований, предъявляемых временем установления и временем удержания. Если это происходит, то выходной сигнал МЕТА становится метастабильным и остается в этом состоянии произвольно долго. Предположим, однако, что максимальное время метастабильности, после того как прошел фронт тактового сигнала, равно Коль скоро период тактового сигнала больше, чем плюс время установления триггера FF2, сигнал SYNCIN становится синхронной копией асинхронного входного сигнала на следующем такте тактового сигнала, никогда не оказываясь метастабильным. Далее сигнал SVNCIN можно использовать повсеместно в системе по мере необходимости.
23.Анализ времени пребывания в состоянии метастабильности
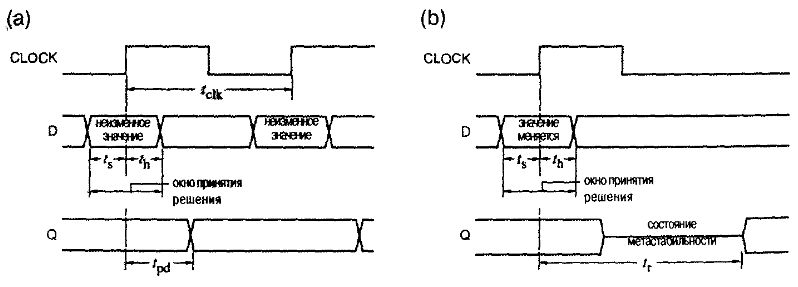
На
рис. 8.97 приведены временные параметры,
учитываемые при анализе времени
пребывания в метастабильном состоянии.
Обозначим указываемые производителем
время установления и время удержания
по обе стороны фронта в тактовом сигнале
через
 и
и
 ;
эти два интервала времени образуют окно
принятия решения:
на этом отрезке триггер берет выборку
сигнала на входе данных и решает,
нужно ему изменять выходной сигнал или
нет. Если сигнал на входе D
изменяется за пределами этого окна, как
показано на рис. (а), то производитель
гарантирует переключение триггера и
его переход в одно из его законных
логических состояний не позднее
времени
.
Если входной сигнал D
изменяется в пределах окна принятия
решения, как показано на рисунке (б), то
метастабильность может возникнуть и
просуществовать до конца интервала
времени
.
;
эти два интервала времени образуют окно
принятия решения:
на этом отрезке триггер берет выборку
сигнала на входе данных и решает,
нужно ему изменять выходной сигнал или
нет. Если сигнал на входе D
изменяется за пределами этого окна, как
показано на рис. (а), то производитель
гарантирует переключение триггера и
его переход в одно из его законных
логических состояний не позднее
времени
.
Если входной сигнал D
изменяется в пределах окна принятия
решения, как показано на рисунке (б), то
метастабильность может возникнуть и
просуществовать до конца интервала
времени
.
При изменении асинхронного входного сигнала в пределах окна принятия решения длительность пребывания выхода в метастабильном состоянии описывается экспоненциальной зависимостью:
MTBF(
)=
Здесь
MTBF
- среднее
время между отказами синхронизирующего
устройства, если считать, что отказ
происходит в том случае, когда
метастабильность выходит за пределы
отрезка времени длительностью
после фронта тактового сигнала
>=
.
Значение MTBF
зависит от частоты сигнала f
на тактовом входе триггера; а
-
число изменений асинхронного входного
сигнала, поступающего на вход данных
триггера, в секунду; Т
и
 - константы, зависящие от электрических
характеристик триггера. Если MTBF
порядка
нескольких сотен столетий, то надёжность
аппарата приемлема. Если MTBF
порядка
нескольких секунд, проблемы будут
выявлены на стадии испытаний. Хуже
всего, когда MTBF
порядка
года. В этом случае проблемы при испытаниях
могут не возникнуть, но они обязательно
проявятся при серийном производстве.
- константы, зависящие от электрических
характеристик триггера. Если MTBF
порядка
нескольких сотен столетий, то надёжность
аппарата приемлема. Если MTBF
порядка
нескольких секунд, проблемы будут
выявлены на стадии испытаний. Хуже
всего, когда MTBF
порядка
года. В этом случае проблемы при испытаниях
могут не возникнуть, но они обязательно
проявятся при серийном производстве.