

27. Дифференнциальная и мостовая схемы му. Пояснить принцип работы. Характеристика управления му.
Дифференциальная схема

Дифференциальный магнитный усилитель с обмотками смещения
Чтобы сделать магнитный усилитель чувствительным к полярности тока управления, вводят обмотку смещения wсм, с помощью которой создают постоянное начальное подмагничивание магнитопровода (рис. 10.24). К МДС управления добавляется постоянная величина — МДС смещения, при этом характеристика магнитного усилителя сдвигается влево. Рабочая характеристика усилителя с обмоткой смещения дана на рис. 10.25. Смещение можно менять с помощью резистора Rcм..
Если смещения нет, то при любой полярности тока управления магнитопровод намагничивается. При наличии тока в обмотке смещения магнитопровод изначально уже подмагничен, а ток управления в зависимости от полярности либо увеличивает, либо уменьшает намагниченность магнитопровода. Таким образом, при положительной полярности тока управления ток в рабочей обмотке увеличивается, а при отрицательной полярности уменьшается (в пределах линейного участка характеристики).

Обмотка смещения используется также для начального симметрирования сложных схем, включающих два (или более) магнитных усилителя. В этом случае регулировочный резистор RCM выводится на щит управления автоматической системой.
Для
устранения
отмеченных
ранее
недостатков
магнитные
усилители
собирают
по
различным
двухтактным
схемам.
Наиболее простой
из
усилителей
— дифференциальный
магнитный
усилитель
с обмотками
смещения
(рис.
10.26). Этот
усилитель
собран
из
двух трансформаторных
усилителей,
но
можно использовать
и
два дроссельных
магнитных
усилителя.

Рассмотрим его работу.
В цепи нагрузки действуют две ЭДС, индуцируемые в обмотках W2- Эти ЭДС направлены навстречу друг другу. Если управляющий сигнал отсутствует (Uy = 0), то магнитное состояние магнитопроводов W2, полностью компенсируют друг друга. Результирующая ЭДС Е = Е1 — E2=0, ток в нагрузке отсутствует.
Если к управляющим обмоткам пoдведено положительное напряжение, то левый магнитопровод размагничивается, а правый переходит в более насыщенное состояние, ЭДС Е1 увеличивается, а ЭДС E2. уменьшается, результирующая ЭДС Е совпадает по фазе с Е1.
Если к управляющим обмоткам подвести отрицательное напряжение, то левый магнитопровод подмагничивается еще больше, правый размагничивается; ЭДС Е2> Е1и результирующая ЭДС Е совпадает по фазе с E2. Ток в нагрузке Z„ пропорционален результирующей ЭДС E. Зависимость тока Iн в нагрузке от тока управления Iу изображена на рис. 10.27.
Мостовая схема

Магнитный усилитель, собранный по мостовой схеме
Магнитный усилитель, собранный по мостовой схеме, изображен на рис. 10.30. Чтобы понять его работу, следует иметь в виду, что рабочие обмотки w1, w 2, w3, w4 соединены по мостовой схеме (рис. 10.31). В этом нетрудно убедиться, рассмотрев, какие элементы включены между точками а, b, с, d на рис. 10.30 и 10.31.
При отсутствии управляющего сигнала магнитное состояние магнитопроводов одинаково, сопротивления всех четырех рабочих обмоток одинаковы, мост уравновешен.
При положительной полярности управляющего напряжения левый магнитопровод размагничивается, правый — насыщается. При этом сопротивление обмоток w1 и w2 растет (вследствие увеличения ЭДС самоиндукции), а сопротивление обмоток w3 и w4 уменьшается.
Балансировка моста нарушается, и через нагрузку Zн проходит рабочий ток, который тем больше, чем больше различаются магнитные состояния левого и правого магнитопроводов, зависящие от управляющего тока.
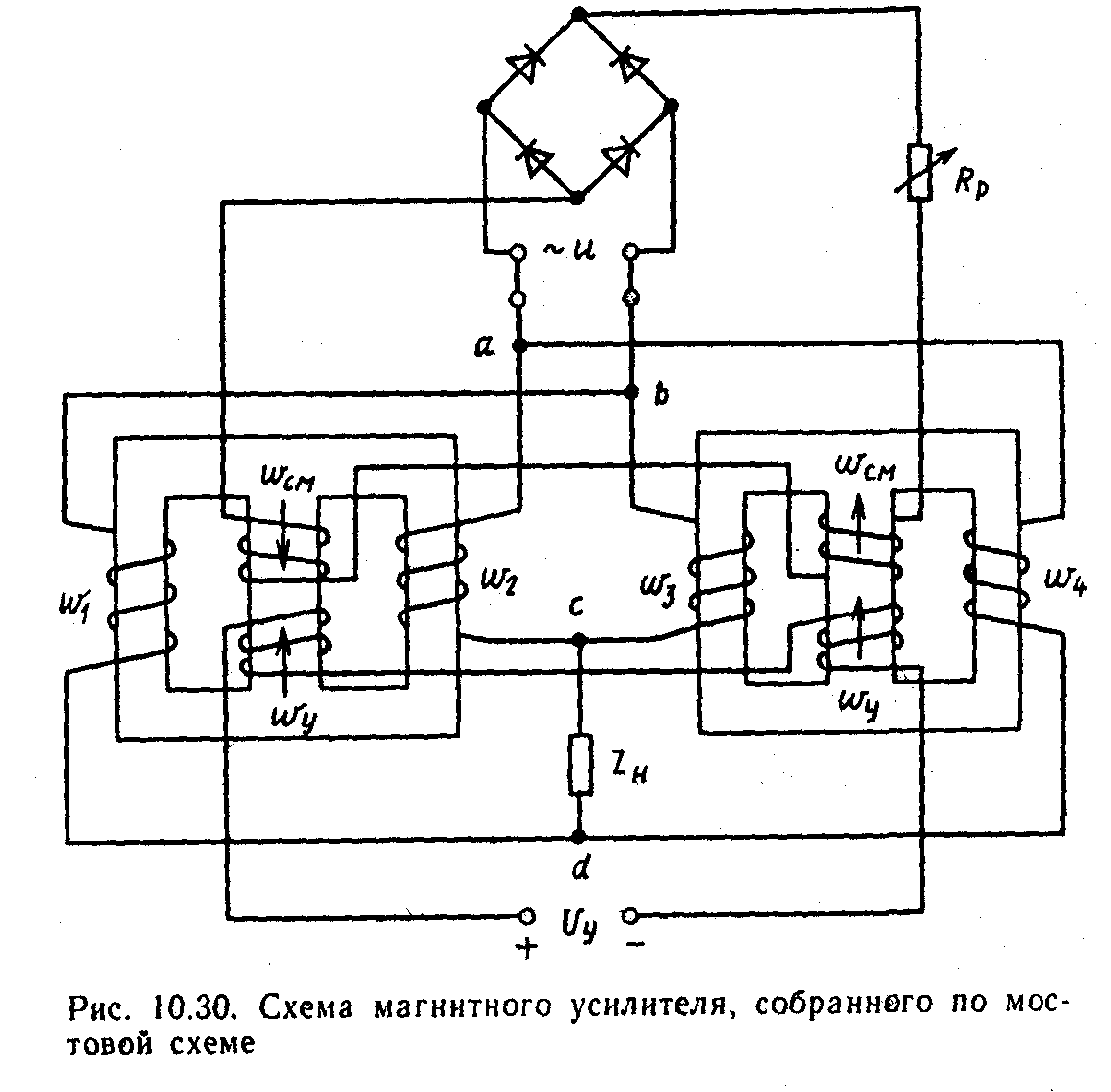

При изменении полярности управляющего напряжения происходит насыщение левого и размагничивание правого магнитопроводов. Сопротивление обмоток w3, w4 станет больше, чем сопротивление обмоток w1, w2. Фаза рабочего тока изменится на 180°, а его значение будет увеличиваться по мере роста управляющего напряжения (тока).
Поскольку разбалансировка моста происходит вследствие согласованного изменения сопротивлений всех четырех плеч, коэффициент усиления усилителя, собранного по мостовой схеме, в четыре раза больше, чем дроссельного.
Рабочая характеристика магнитного усилителя, собранного по мостовой схеме, проходит через начало координат и линейна в широком диапазоне изменений сигнала управления (рис. 10.32). Питание любого магнитного усилителя осуществляется переменным током. Что касается нагрузки, то ею могут быть и потребители постоянного тока, включаемые через выпрямители. Последние обычно собираются на кристаллических диодах.