

24. Преобразователи частоты (пч). Назначение, типы, основные характеристики в статическом и динамическом режимах работы.
Преобразователь частоты — преобразователь,предназначенный для преобразования тока одной частоты в ток другой частоты с возможным изменением значения напряжения и числа фаз [1|. Преобразователи частоты классифицируются по мощности, напряжению, числу фаз входного и выходного напряжений, схеме преобразования и т.д. Работа преобразователя и его технико-экономические характеристики в основном определяются схемой преобразования. От схемы преобразования непосредственно зависят:
параметры выходного напряжения;
коэффициент мощности преобразователя по входу и выходу;
форма кривой переменного тока, потребляемого из питающей сети;
внешняя (нагрузочная) характеристика преобразователя;
КПД.
Преобразователи частоты выполняются с фиксированным соотношением частот входного и выходного напряжений и с переменным их соотношением или с регулируемой частотой. Преобразователи с регулируемой частотой нашли широкое применение в области электропривода для регулирования частоты вращения асинхронных двигателей.
При классификации преобразователей частоты выделяют два основных типа:
1) преобразователи с промежуточным звеном постоянного тока (непрямой преобразователь);
2) преобразователи с непосредственной связью питающей сети и цепей нагрузки, которые в литературе иногда называются преобразователями с неявно выраженным звеном постоянного тока.
Преобразователи на тиристорах с непосредственной связью подразделяются на преобразователи с естественной коммутацией тиристоров (под воздействием напряжения питающей сети), называемые также циклоконверторами, и преобразователи с искусственной (принудительной) коммутацией тиристоров.
Современные радиотехнические и связные системы и устройства предъявляют все более жесткие требования к статическим (стабильность выходного напряжения, величина высокочастотных и низкочастотных пульсаций), динамическим (величина перерегулирования, время установления выходного напряжения при включении или отключении источника питания, скачкообразном изменении входного напряжения или нагрузки) и массогабаритным характеристикам вторичных источников электропитания.
25. Трехфазный пч с непосредственной связью. Привести схему и пояснить принцип работы, а также формулу для определения частоты.
Преобразователем частоты с непосредственной связью называется прямой преобразователь, т.е. преобразователь, в котором энергия источника переменного тока передается в нагрузку непосредственно на проводящих интервалах силовых ключей схемы преобразователя. Наиболее широкое практическое применение преобразователи, выполненные на тиристорах, находят в электроприводе для управления низкоскоростными двигателями очень большой мощности. Основой силовой части таких преобразователей являются встречно-параллельно включенные группы тиристров, каждая из которых может работать в выпрямительном или инверторном режиме.
Рассмотрим принцип работы преобразователя с непосредственной связью и естественной коммутацией на примере трехфазно-однофазной схемы (рис. 3.15). В схеме преобразователя можно выделить две группы тиристоров: I - катодную (VS1, VS2, VS3) и II — анодную (VS4, VS5, VS6). Допустим, что нагрузка Zн, — активная. Управляющие импульсы в процессе работы поступают на тиристоры анодной и катодной групп поочередно. Когда управляющие импульсы, синхронизированные по частоте с напряжение питающей сети, подаются последовательно на тиристоры VS1, VS2, VS3 катодной группы, она работает в режиме выпрямления (по трехфазной схеме со средней точкой), формируя на нагрузке положительную полуволну напряжения относительно нулевого вывода трансформатора (см. рис. 3.15, 6). Управляющие импульсы поступают на тиристоры со сдвигом относительно линейных напряжений питающей сети на угол а. При работе тиристоров VS4t VS5, VS6 анодной группы на нагрузке относительно нулевого
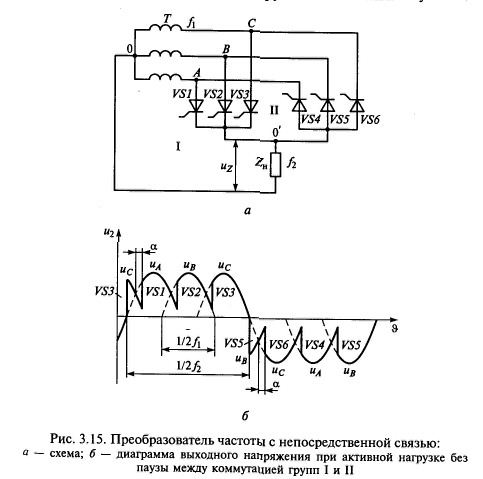
вывода трансформатора формируется отрицательная полуволна напряжения. В результате цикличной работы групп I и II на нагрузке создается переменное напряжение с частотой основной гармоники f2 более низкой, чем частота питающей сети f1.
Частота f2 определяется временем, в течение которого проводят ток тиристоры каждой группы. Изменением угла а можно регулировать выходное напряжение. Для исключения постоянной составляющей в напряжении на нагрузке времена работы анодной и катодной групп должны быть равны между собой. На рис. 3.15, 6 представлена диаграмма выходного напряжения при активной нагрузке. Из диаграммы видно, что тиристоры катодной группы вступают в работу только после снижения до нуля полуволны напряжения, формируемой анодной группой, и наоборот. Это объясняется тем, что тиристор находится во включенном состоянии до тех пор, пока ток, протекающий через него (в рассматриваемом случае ток совпадает по фазе с напряжением), не спадет до нуля.
В трехфазно-однофазной схеме тиристоры каждой группы коммутируют между собой (внутри групповая коммутация) через интервал времени, равный п/3. Поэтому без учета интервала коммутации можно записать следующее выражение для длительности одной полуволны выходного напряжения:
![]()
где п — число участков синусоид в полуволне; п - 2п/3 — угол, обусловленный спаданием до нуля заднего фронта полуволны выходного напряжения.
В общем случае при числе фаз питающей сети, равном т, связь частот выходного и входного напряжений выражается соотношением
![]()
где f1, иf2 — частоты входного и выходного (основной гармоники) напряжений.
Согласно (3.19) частота выходного напряжения f2 может иметь только дискретные значения. Для плавного изменения этих значения создается пауза между интервалами коммутаций групп I и II.
При активно-индуктивной нагрузке для рекуперации энергии, накопленной в индуктивности двигателя, тиристорные группы поочередно переходят из выпрямительного в инверторный режимы. Для этого управляющие импульсы подаются на группу тиристоров в один полупериод с углом а, обеспечивая выпрямительный режим, а в другой полупериод с углом 3, обеспечивая соответствуюший инверторный режим. При этом на другую группу тиристоров импульсы полаются в обратной последовательности — в первый полупериод согласно инверторному режиму, а во второй — выпрямительному.
Содержание высших гармоник в выходном напряжении может быть значительно уменьшено, если углы управления а и b изменять по арккосинусному закону
![]()
где к — отношение амплитуд напряжений на входе и выходе преобразователя; to — частота выходного напряжения.
Из (3.20) следует, что при к = 1 углы а и и должны изменяться линейно во времени (т.е. арккосинусная функция в данном случае превращается в линейную функцию от б) от 0 до п/2.