

6.5. Стабилизация и углы установки управляемых колес
Под стабилизацией понимают способность управляемых колес возвращаться в нейтральное положение. Стабилизация облегчает управление автомобилем, так как предотвращает самопроизвольное отклонение управляемых колес от нейтрального положения под действием боковых реакций дороги и тем самым освобождает водителя от необходимости постоянно поддерживать их в нейтральном положении. При хорошей стабилизации управляемых колес можно длительно сохранять прямолинейность движения без вмешательства водителя. При плохой стабилизации всякие случайные отклонения управляемых колес должны выправляться водителем путем воздействия на рулевое колесо, что делает управление машиной излишне утомительным. Хорошая стабилизация помогает управляемым колесам самостоятельно возвращаться в нейтральное положение в конце поворота. Стабилизация обеспечивается за счет наклона оси шкворня в поперечной и продольной плоскостях автомобиля, а также в результате увода шин при действи центробежных и других боковых сил на криволинейном участке дороги.
Если ось шкворня вертикальна, то при повороте колеса на 1800 (в действительности угол поворота θ управляемых колес обычно не превышает 400) точка А перейдет в точку А1 (рис. 6.6) и никакого стабилизирующего действия поворот не вызовет. Если же ось шкворня наклонена к вертикали на некоторый угол α, то поворот колеса на угол θ должен был бы вызвать перемещение точки А в точку А′. Но поскольку на твердой дороге невозможно перемещение средней точки контакта шины с дорогой ниже ее уровня, то в этом случае будет происходить подъем балки переднего моста. Для подъема ее требуется приложить дополнительное усилие к рулевому колесу. Когда же водитель отпускает рулевое колесо, то под действием веса G1 балка опускается в свое нижнее положение, а управляемые колеса возвращаются в нейтральное. Стабилизирующий эффект зависит от величин угла αст наклона оси шкворня, нагрузки G1, приходящейся на передний мост, и угла поворота управляемых колес. Он тем больше, чем больше эти величины.
Элементарная работа, совершаемая при подъеме одним колесом передней части автомобиля,
dA1 = G1.1dh,
где G1.1 - доля веса автомобиля, приходящаяся на одно переднее колесо, dh – приращение высоты подъема передней части при повороте этого колеса на малый угол.
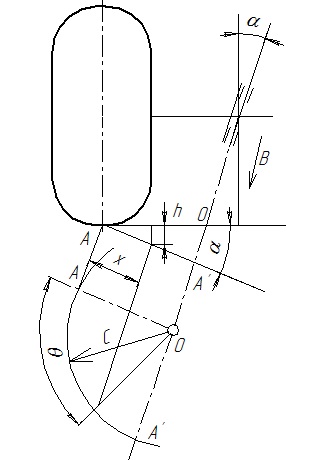
Рис. 6.6. Углы наклона оси поворота (шкворня) управляемых колес
Работа, совершаемая при повороте управляемого колеса:
dA2 = Mстdθ,
где Мст – момент сопротивления повороту, равный стабилизирующему моменту колеса при его повороте на угол dθ.
Если пренебречь различием углов поворота управляемых колес, приравнивая dA1 и dA2, получим:
![]() ,
(6.14)
,
(6.14)
где с – плечо обкатки (расстояние от точки А до точки О), α – угол поперечного наклона оси шкворня (рис. 6.6).
Из формулы (6.14) очевидно, что стабилизирующий момент зависит от осевой нагрузки на передний мост, угла поворота и поперечного наклона оси шкворня
При наклоне шкворня в продольной плоскости (наклон назад) под углом β стабилизирующий эффект обеспечивается за счет появления так называемого плеча устойчивости bβ, на котором действует боковая реакция дороги Ry, приложенная в точке С перпендикулярно к плоскости колеса (рис. 6.7). Она дает стабилизирующий момент
М'ст = Ry bβ.
Поскольку при повороте колеса на него действует боковая сила Ру, вызывающая боковой увод шины, то боковая реакция дороги смещается в заднюю часть контакта шины. Она приложена в этом случае не в точке С, а на некотором расстоянии bδ от нее – в точке D. В результате суммарное плечо устойчивости равно bст = bβ + bδ, а стабилизирующий момент
Мст = Py (bβ + bδ) = Py bст. (6.15)
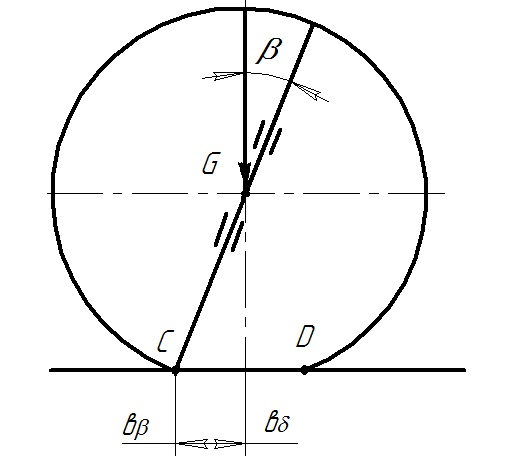
Рис. 6.7. Схема с продольным уклоном оси шкворня
Стабилизирующий момент даже при небольших углах увода весьма значителен. Поэтому углы наклона оси шкворня невелики и составляют в поперечной плоскости α = 4 - 60, а в продольной – β ≈ 0 - 20. Иногда угол β делают даже отрицательным.
Стабилизирующий момент согласно формулам (6.14) и (6.15) возрастает с увеличением углов наклона шкворня, размеров шин, давления в них, осевой нагрузки и других факторов, влияющих на угол увода. На него влияет также момент трения в рулевом управлении.
Плоскость управляемых колес автомобиля устанавливается под углом γ к вертикали, называемым углом развала колес (рис. 6.8). Обычно этот угол колеблется в пределах от 10' до 50' для легковых и от 45' до 1о30' для грузовых автомобилей.
Угол развала необходим для того, чтобы в результате деформации деталей переднего моста под действием осевой нагрузки, выбора зазоров в подшипниках, шкворневых и шаровых сочленениях не произошел наклон плоскостей колес в обратную сторону.
Угол развала обеспечивается за счет соответствующей конструкции поворотной цапфы, размеров рычагов подвески и т.д.
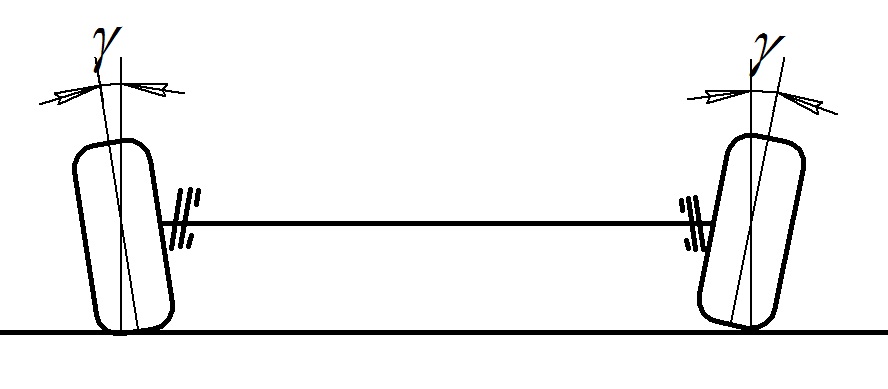
Рис. 6.8. Угол развала управляемых колес
Кроме того, развал необходим для уменьшения плеча обкатки ау без увеличения поперечного наклона оси шкворня. Уменьшение плеча обкатки снижает усилие на рулевом колесе, необходимое для поворота автомобиля и нагрузки в рулевом приводе. При наличии развала плечо обкатки уменьшается, что влияет на момент сопротивления повороту и облегчает управление автомобилем; колесо поджимается к внутреннему подшипнику ступицы, исключающее виляние колеса в случае появления зазора в подшипниках ступицы и обратного развала при износе поворотных цапф.
При наличии зазоров в рулевой трапеции боковые реакции дороги и удары колес о неровности вызывают отрицательное схождение колес в горизонтальной плоскости, что увеличивает сопротивление их качению и износ протектора. Для уменьшения боковой деформации шин управляемых колес и снижения их сопротивления качению и износу им дают небольшой угол схождения (рис. 6.9), такой, что расстояние А между ободами правых и левых колес, замеренное на уровне их осей спереди, меньше расстояния Вк, замеренного сзади. Углы схождения обычно подбирают экспериментальным путем. Каждому углу развала соответствует вполне определенная величина угла схождения.
Следует иметь в виду, что на скользких дорогах стабилизирующий эффект от наклона оси шкворня в продольной плоскости и увода уменьшается. Это объясняется снижением величины боковой реакции Ry. Кроме того, наличие плеча устойчивости bст = bβ + bδ может привести в определенных условиях (действие боковой силы Ру) к появлению дестабилизирующего момента Мд =Py bст, стремящегося развернуть автомобиль. В этом случае стабили
зация обеспечивается только за счет наклона оси шкворня в поперечной плоскости. Однако наблюдаются и отрицательные последствия, так как управляемые колеса, имеющие наклон, стремятся раскатиться в разные стороны, чему препятствует балка переднего моста штанги стабилизатора и другие элементы подвески. В результате шины управляемых колес получают дополнительную боковую деформацию, что ведет к значительному увеличению коэффициента сопротивления качению и износа шин. Это обусловлено тем, что элементы шины, расположенные ближе к оси колеса (r1), вынуждены проскальзывать, а элементы шины, расположенные дальше от оси (r2), пробуксовывать. Поэтому углы развала обычно не превышают 1,50.
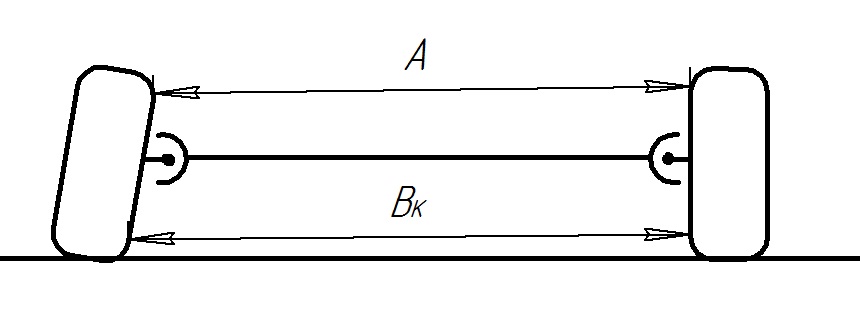
Рис.6.9. Схождение управляемых колес
Оценка стабилизирующих свойств управляемых колес производится по усилию, необходимому прикладывать к рулевому колесу при движении автомобиля по кругу. Стабилизация считается нормальным, если для удержания автомобиля на круговой траектории при боковом ускорении аy = 4 м/с2 и скорости движения 40 и 80 км/ч к рулевому колесу необходимо прилагать усилие в пределах 60 – 120 Н. С увеличением скорости автомобиля это усилие не должно уменьшаться для сохранения тактильной информативности.