

6.4. Колебания управляемых колес
При движении автомобиля по неровной дороге возникают не только вертикальные колебания управляемых колес, но также и угловые – около шкворней поворотных цапф. Если амплитуда угловых колебаний значительна, то возможно ухудшение управляемости или даже потеря ее , без их заноса. Угловые колебания управляемых колес могут возникнуть в результате действия гироскопического момента при наклоне плоскости вращающегося колеса, из-за наличия на колесах неуравновешенных масс и несоответствия кинематики подвески управляемых колес кинематике рулевого привода.
Если автомобиль имеет зависимую переднюю подвеску, то при проезде неровности дороги одним колесом наклоняются плоскости обоих вращающихся колес на угол ψ , что приводит к возникновению гироскопического момента Мг (рис. 6.3), стремящегося повернуть управляемые колеса около шкворней. Гироскопический момент определим по выражению
|
|
где Iк – момент инерции колеса; ωк – угловая скорость вращения колеса; ωβ – угловая скорость наклона плоскости колеса.
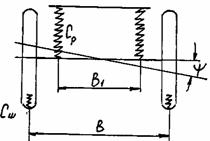
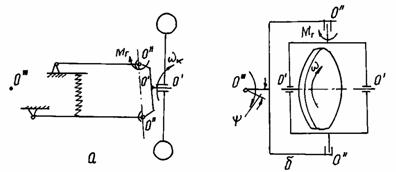
Рис.6.3. Схема для определения гироскопического момента колес.
При небольших скоростях автомобиля угловые скорости ωк и ωβ невелики, и гироскопический момент недостаточен для преодоления трения между шинами и дорогой в рулевом приводе. Поэтому такой момент не может вывести управляемые колеса из нейтрального положения. Когда же скорость достигнет 60–70 км/ч, гироскопический момент может стать причиной возникновения незатухающих колебаний управляемых колес около шкворней, ухудшающих управляемость или делающих автомобиль неуправляемым. Наиболее радикальным средством, уменьшающим действие гироскопического момента, является применение для передних (управляемых) колес независимой подвески. В этом случае правое и левое управляемые колеса перемещаются в вертикальной плоскости независимо друг от друга, а наклоны их сводятся к минимуму, что исключает появление значительных гироскопических моментов.
Существенное уменьшение колебания колес вокруг поворотных стоек возможно устранением гироскопического момента путем применения подвески, деформация которой не вызывает изменение плоскости колеса. Хорошие результаты даст применение рычажной подвески, у которой нижние рычаги немного длиннее верхних так, чтобы изменение колеи было не более 4 мм (рис. 6.3, а). Такое изменение колеса не отражается на управляемости автомобиля и на износе шин. Телескопическая подвеска (подвеска Макферсона) обеспечивает перемещение колеса строго в одной плоскости при деформации упругого элемента.
Для легковых автомобилей с задними ведущими колесами в основном используют независимую подвеску на поперечных рычагах или рычажно-телескопическую. При деформации подвески в результате наезда колеса на дорожную неровность только равная длина рычагов обеспечит сохранение установленного угла развала колеса. Однако при этом колесо будет смещаться в поперечном направлении, что приведет к изменению колеи автомобиля, ухудшению устойчивости и большему износу шин. Поэтому обычно рычаги подвески делают неодинаковой длины, что уменьшает смещение колес в поперечном направлении, но вызывает изменение угла развала колес и приводит к возникновению гироскопического момента. Угловая частота собственных колебаний переднего моста уменьшается при снижении жесткости рессор (или других упругих элементов) и шин, а также при увеличении момента инерции моста.
Если колеса недостаточно сбалансированы, то при их вращении возникают центробежные силы Рц (рис. 6.4). Составляющие Рх этих сил образуют моменты, стремящиеся повернуть колеса вокруг поворотных стоек или осей шкворней. Особенно неблагоприятны случаи, когда неуравновешенными оказываются оба колеса, причем их центробежные силы направлены в противоположные стороны, как это показано на рисунке 6.4, б. Возникающие в результате этого суммарные поворачивающие моменты переменны по направлению и вызывают «виляние» колес. Наряду с этим составляющие центробежных сил Рц вызывают «раскачивание» колес в вертикальной плоскости. Чем выше скорость движения, тем заметней влияние неуравновешенности колес.
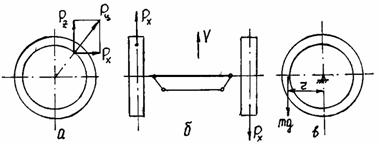
Рис. 6.4. Схема сил, возникающих при неуравновешенности управляемых колес
Как было показано выше, величина центробежной силы инерции
![]() ,
,
где m – неуравновешенная масса колеса; ωк – угловая скорость вращения колеса; r – радиус вращения неуравновешенной массы.
Величину массы m определяют при динамической или статической балансировке колеса путем измерения момента дисбаланса Мдб, создаваемого силой mg (рис. 6.4, в).
При качении колеса направление и величина составляющих центробежных сил непрерывно изменяются. Когда скорость автомобиля невелика, центробежная сила мала и не может вызвать колебания управляемых колес. Однако при больших скоростях возникают незатухающие колебания управляемых колес, ухудшающие или нарушающие управляемость автомобиля. Влияние неуравновешенности колес устраняется путем уменьшения допусков на дисбаланс колес в сборе. Кроме того, для уменьшения влияния неуравновешенности колес на их колебания вокруг шкворней целесообразно уменьшить расстояние от шкворня до плоскости колеса, т.е. размещать шкворень внутри обода колеса, что позволяет уменьшить плечо действия центробежных сил, соответственно, улучшить управляемость автомобиля.
Колебания управляемых колес возникают и в результате несоответствия кинематики подвески кинематике рулевого привода. При вертикальных колебаниях передних колес (рис. 6.5) шарнир 1 на конце рычага поворотной цапфы совершает колебания по траектории ММ с центром колебаний около простого шарнира 2 рессоры 3. С другой стороны, шарнир 1 принадлежит продольной рулевой тяге 4 и может совершать колебания по траектории NN с центром колебаний в нижнем шарнире сошки 5. Действительная траектория движения FF шарнира 1 будет отличаться от траекторий ММ и NN , что вызовет поворот управляемых колес около шкворней.
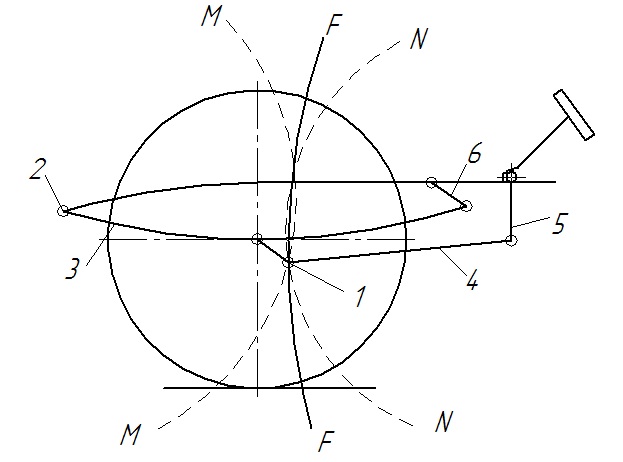
Рис. 6.5. Схема колебаний управляемых колес в случае несоответствия кинематики зависимой подвески кинематике рулевого привода.
Чтобы уменьшить угловые колебания колес, необходимо совместить или сблизить траектории ММ и NN. Этого можно достичь установкой простого шарнира 2 рессоры 3 сзади, а серьги 6 рессоры – спереди или установкой рулевого механизма впереди балки переднего моста. В первом случае оба центра траектории ММ и NN будут сзади от балки передней оси, а во втором случае – спереди от нее.