

При Ртор равной : 1 – 0,6Gφ; 2 – 0,8 Gφ; 3 – Gφ; 4 - Рдв
Величина Рсум. в основном определяется интенсивностью торможения Ртор. Поскольку с увеличением скорости сопротивление воздуха возрастает пропорционально квадрату скорости, то Рсум = f(v) представляет собой при Ртоп = const нелинейную зависимость (рис. 4.6).
Чем больше сила торможения Ртор (относительно ее максимального значения Ртор.max ≈ Gφ), тем выше кривая Рсум. Если кривые Рсум проходят выше Рдв, то торможение двигателем менее эффективно, чем торможение автомобиля лишь одними тормозами. Поэтому в случае торможения автомобиля с небольшой интенсивностью торможение с двигателем более эффективно. поэтому наибольший эффект торможение с двигателем дает на скользкой дороге, а также на крутых спусках, обеспечивая равномерные силы Рдв между правыми и левыми ведущими колесами благодаря наличию дифференциала в трансмиссии АТС, что улучшает устойчивость автомобиля.
Из
формулы (4.53) также очевидно, что Рдв
возрастает при переходе перед торможением
на более низкую передачу, т.к. коэффициент
учета вращающихся масс увеличивается
пропорционально квадрату передаточного
числа
![]() включенной
передачи (см. формулу 4.50).
включенной
передачи (см. формулу 4.50).
Для повышения Ртор рабочей тормозной системы за счет лучшего сцепления шин с дорогой, покрытой снегом и льдом, нужно зимой переходить на зимнюю резину, в том числе с шипованными протекторами.
4.10. Автоматическое регулирование тормозных сил автомобиля. Антиблокировочные системы
На мокрых и скользких дорогах при интенсивном нажатии на педаль тормоза с целью быстро остановить автомобиль либо резко снизить его скорость, колеса могут блокироваться, что существенно снижает сцепление шин с дорогой. Опытный водитель в таких случаях будет тормозить прерывисто, регулируя усилие на педаль таким образом, чтобы сохранить максимальное сцепление колес с дорогой и не допустить заноса автомобиля. Однако не все водители имеют достаточный опыт и самообладание в аварийных ситуациях, чтобы достаточно точно оценить дорожную ситуацию. Отсюда вытекает необходимость создания системы управления торможением с элементами интеллекта. Эта система получила название антиблокировочная (Аnti Bloking system, ABS).
Антиблокировочную систему (АБС) устанавливают на автомобиль для предотвращения блокировки колес во время торможения и сохранения при этом управляемости и курсовой устойчивости автомобиля. Она состоит из трех основных элементов (рис. 4.7): электронного блока управления, гидравлического блока – гидромодулятора и датчиков скорости колес.
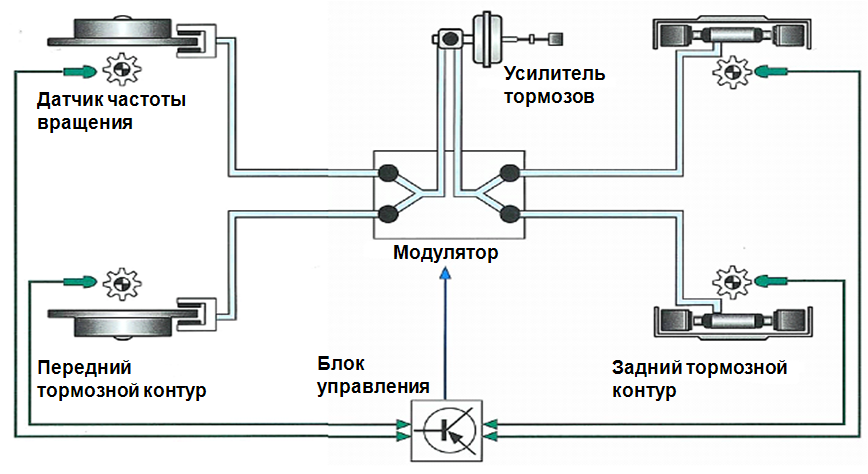
Рис. 4.7. Контур управления АБС:
В основу работы колесных датчиков положен принцип электромагнитной индукции. При вращении колеса с жестко связанным с ним зубчатым ротором мимо датчика 3 проходят зубцы и впадины ротора и наводят в обмотке датчика электрический сигнал, частота которого пропорциональна угловой скорости колеса и количеству зубцов на роторе. Устанавливают вместо индукционных и датчики Холла с интегрированной микросхемой, которые позволяют отслеживать изменение напряженности поля, возникающего при изменении магнитного поля в процессе качения зубчатого ротора.
При экстренном торможении давление в приводе возрастает, величина скольжения колеса в пятне контакта с дорогой увеличивается, коэффициент скольжения возрастает до критического значения (Sкр = 0,15 – 0,3), при котором коэффициент продольной силы достигает максимального значения (Кх max = φx max). Начиная с этого момента, любое дальнейшее увеличение давления в приводе или тормозного момента не вызывает дальнейшего повышения тормозной силы, наоборот, снижается φх (кх) и φу (ку) с разной интенсивностью до значений φ0, соответствующих коэффициенту скольжения Sск = 1 (рис. 4.8).
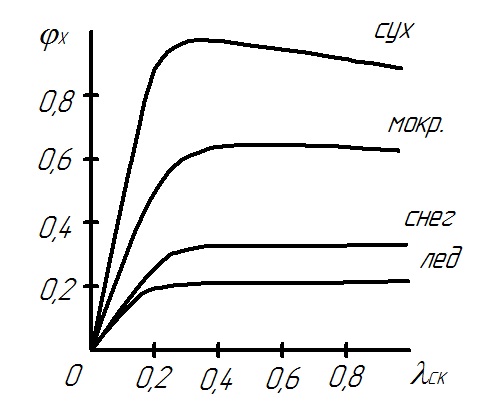
Рис. 4.8. Зависимость коэффициента сцепления колеса от коэффициента